Las transformaciones lineales son funciones entre espacios vectoriales que preservan...
Entendiendo las Transformaciones Lineales
Alex Germán Luna@aalexxluna
1 / 13
1
of 13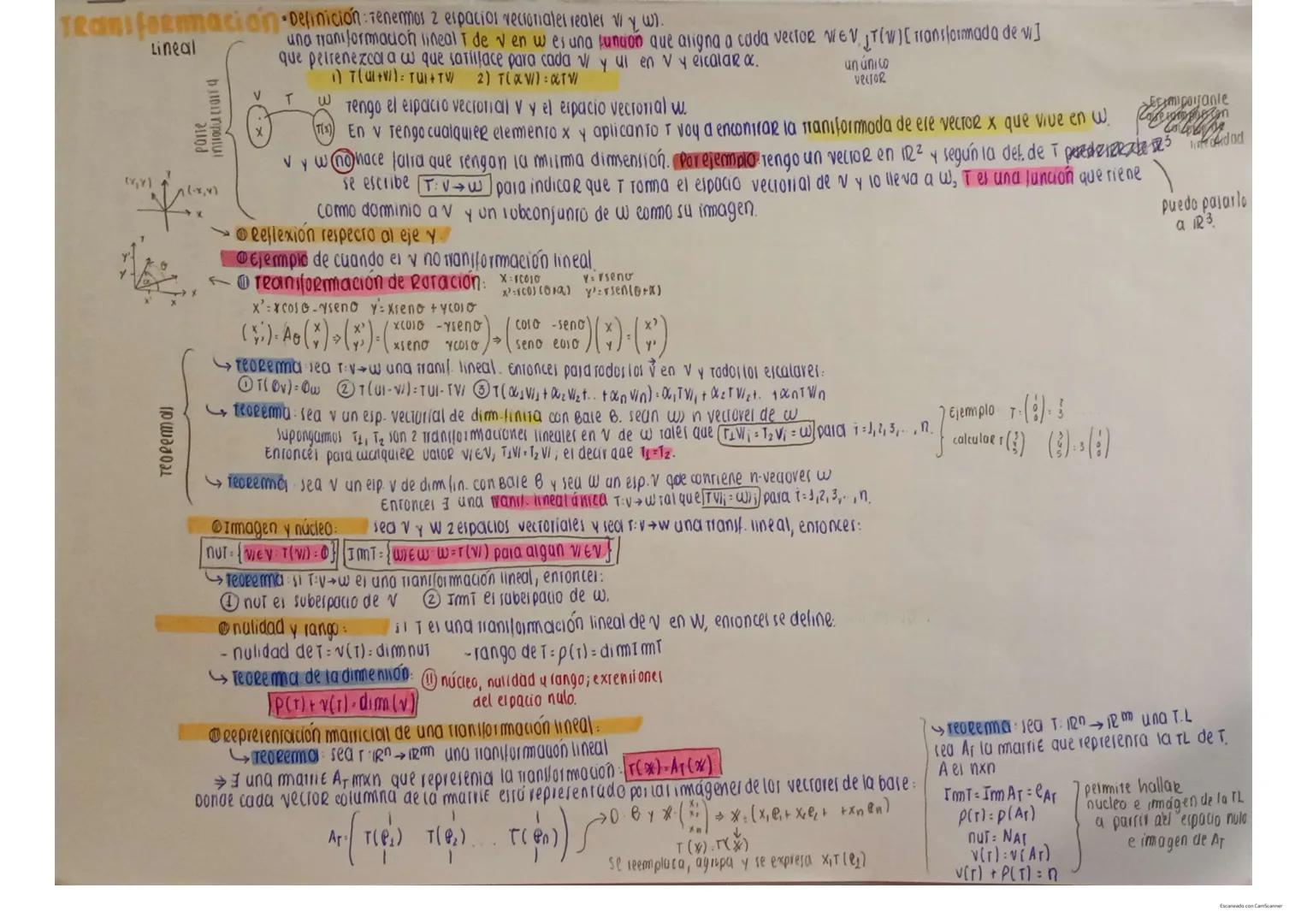
Transformación Lineal
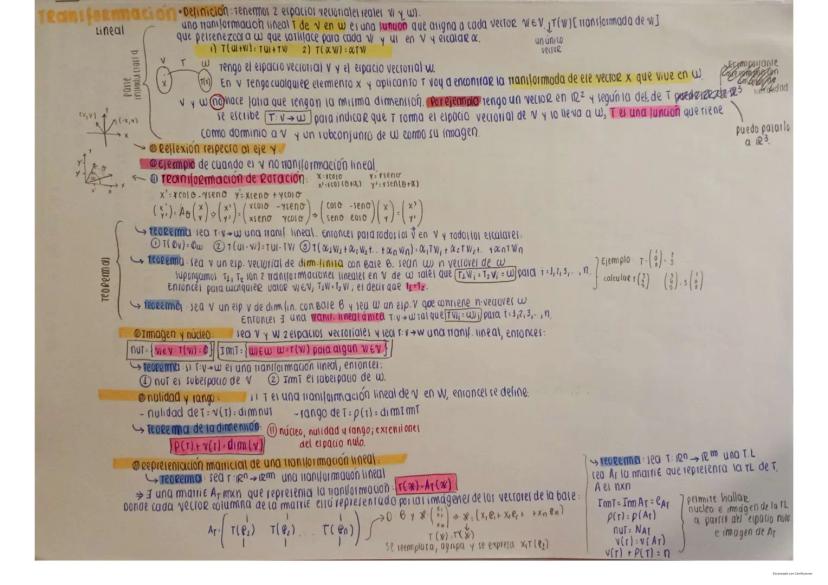
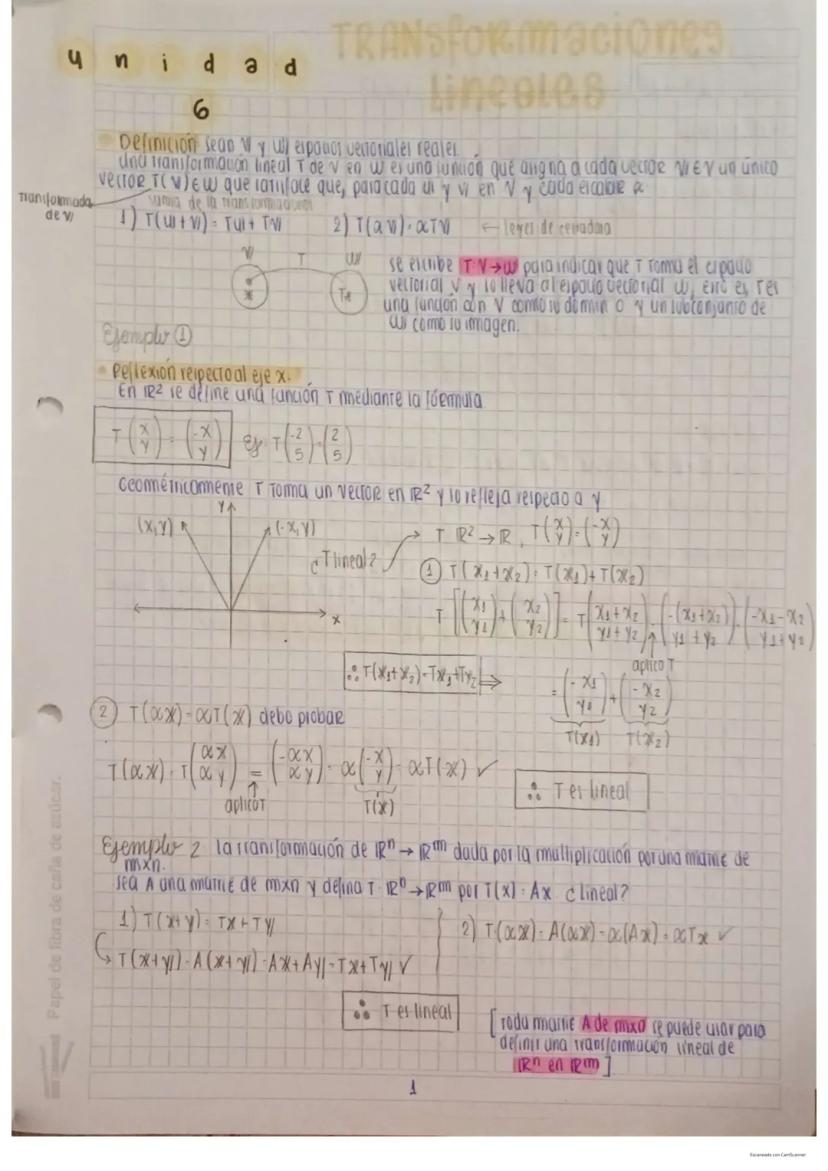
Una transformación lineal es una función entre dos espacios vectoriales que mantiene la estructura algebraica. Si tenemos espacios vectoriales V y W, una transformación T: V → W asigna a cada vector en V exactamente un vector en W, cumpliendo dos propiedades fundamentales:
- T = T + T - Preserva sumas
- T(αv) = αT - Preserva multiplicación por escalares
Lo interesante es que V y W pueden tener dimensiones diferentes. Por ejemplo, puedes transformar un vector de ℝ² a ℝ³. La notación T: V → W indica que T toma vectores del dominio V y los envía a un subconjunto de W.
⚡️ Dato clave: Toda transformación lineal preserva el origen. Siempre se cumple que T(0) = 0, lo que puedes demostrar fácilmente usando las propiedades básicas.
Las transformaciones lineales tienen propiedades importantes como el núcleo (Nuc T), que es el conjunto de vectores que T transforma en el vector cero, y la imagen (Im T), que es el conjunto de todos los vectores que pueden obtenerse al aplicar T a algún vector de V. Ambos conjuntos son subespacios vectoriales.
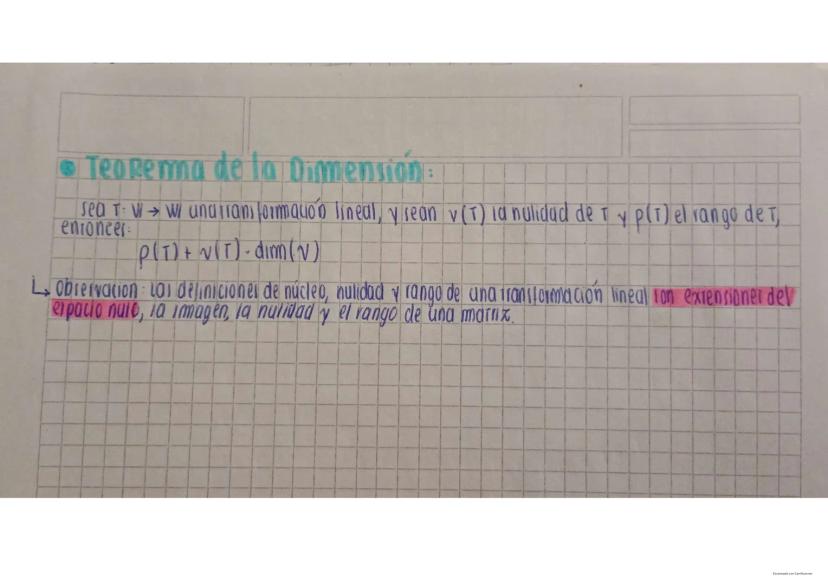
La dimensionalidad de estos subespacios está relacionada por el Teorema de la Dimensión: ρ(T) + ν(T) = dim(V), donde ρ(T) es el rango y ν(T) es la nulidad de T. Esta ecuación es fundamental para entender cuánta información se preserva o se pierde en la transformación.
2
of 13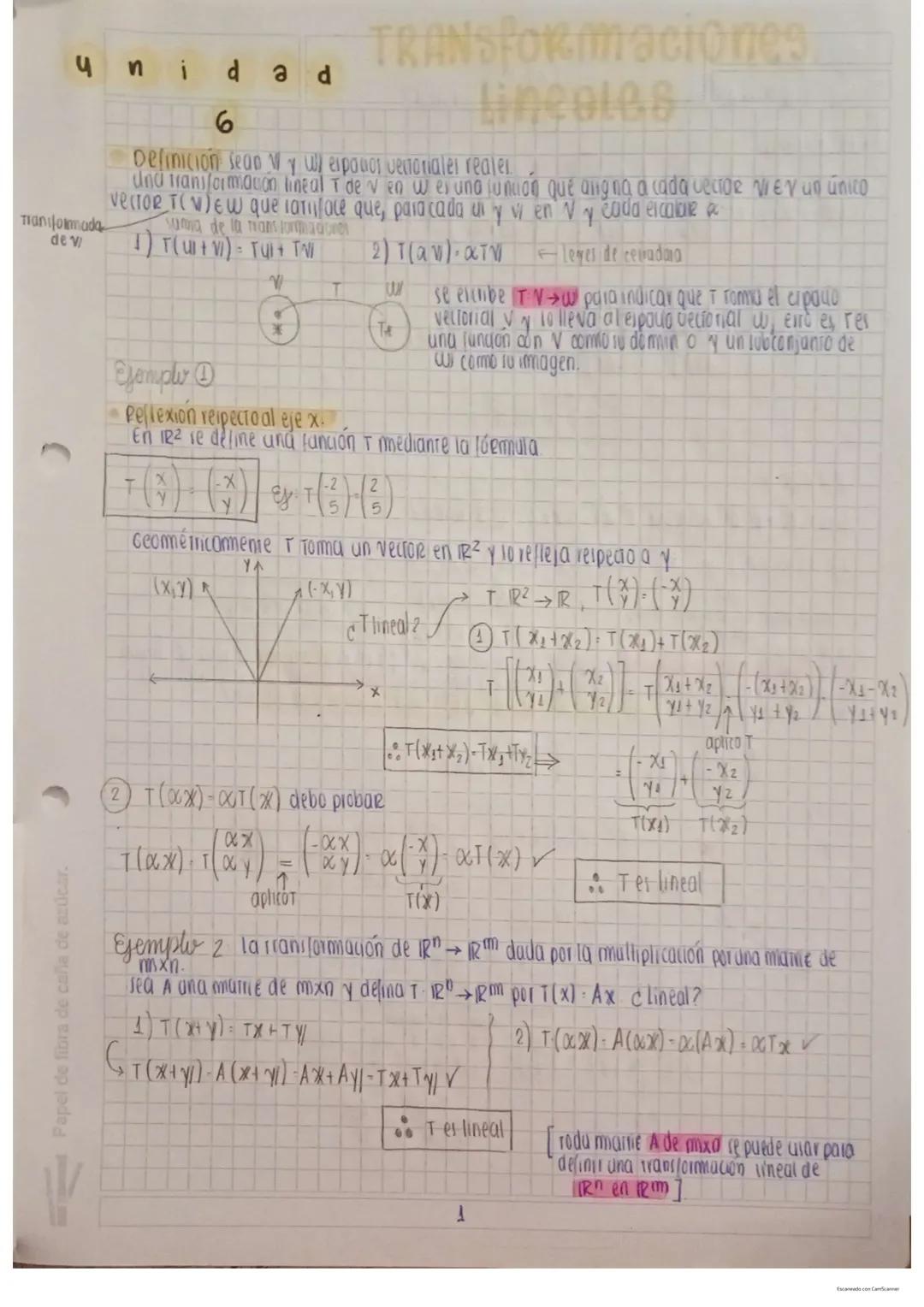
Ejemplos de Transformaciones Lineales
Las transformaciones lineales aparecen constantemente en matemáticas y sus aplicaciones. Vamos a explorar algunos ejemplos claros para entender mejor su funcionamiento:
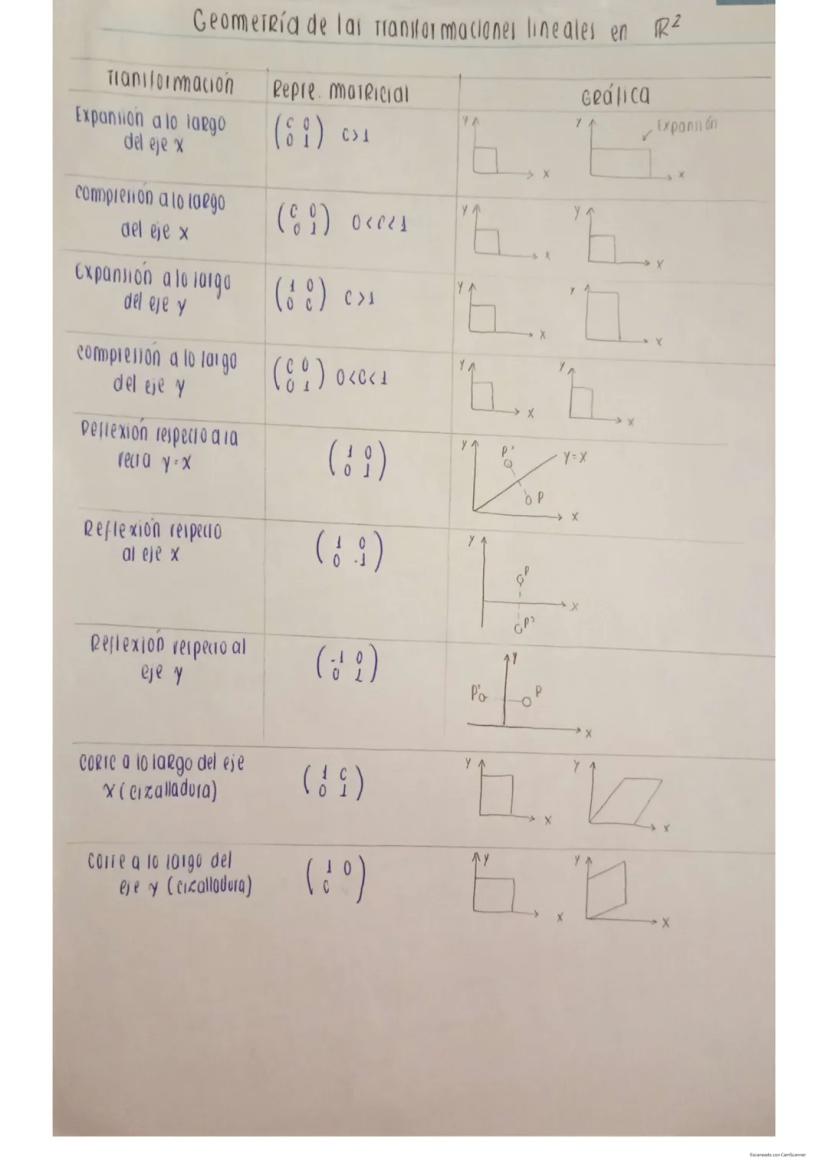
La reflexión respecto al eje y es una transformación lineal que convierte (x,y) en . Es fácil comprobar que cumple las propiedades: si reflejamos dos vectores y luego los sumamos, obtenemos el mismo resultado que si los sumamos primero y luego reflejamos.
La multiplicación por una matriz es siempre una transformación lineal. Si definimos T = Ax donde A es una matriz m×n, entonces T transforma vectores de ℝⁿ a ℝᵐ. Esta es una de las formas más comunes de representar transformaciones lineales.
💡 Importante: No todas las transformaciones son lineales. Por ejemplo, T = 5x + 2 no es lineal porque tiene un término constante que rompe la regla T(0) = 0.
La rotación en el plano es otra transformación lineal clásica. Cuando rotamos un vector (x,y) un ángulo θ, obtenemos un nuevo vector (x',y') donde:
- x' = x·cos(θ) - y·sen(θ)
- y' = x·sen(θ) + y·cos(θ)
Estas transformaciones se pueden representar mediante la matriz de rotación:
[cos(θ) -sen(θ)]
[sen(θ) cos(θ)]
La rotación preserva la longitud de los vectores, lo que la convierte en un tipo especial de transformación lineal llamada isometría.
3
of 13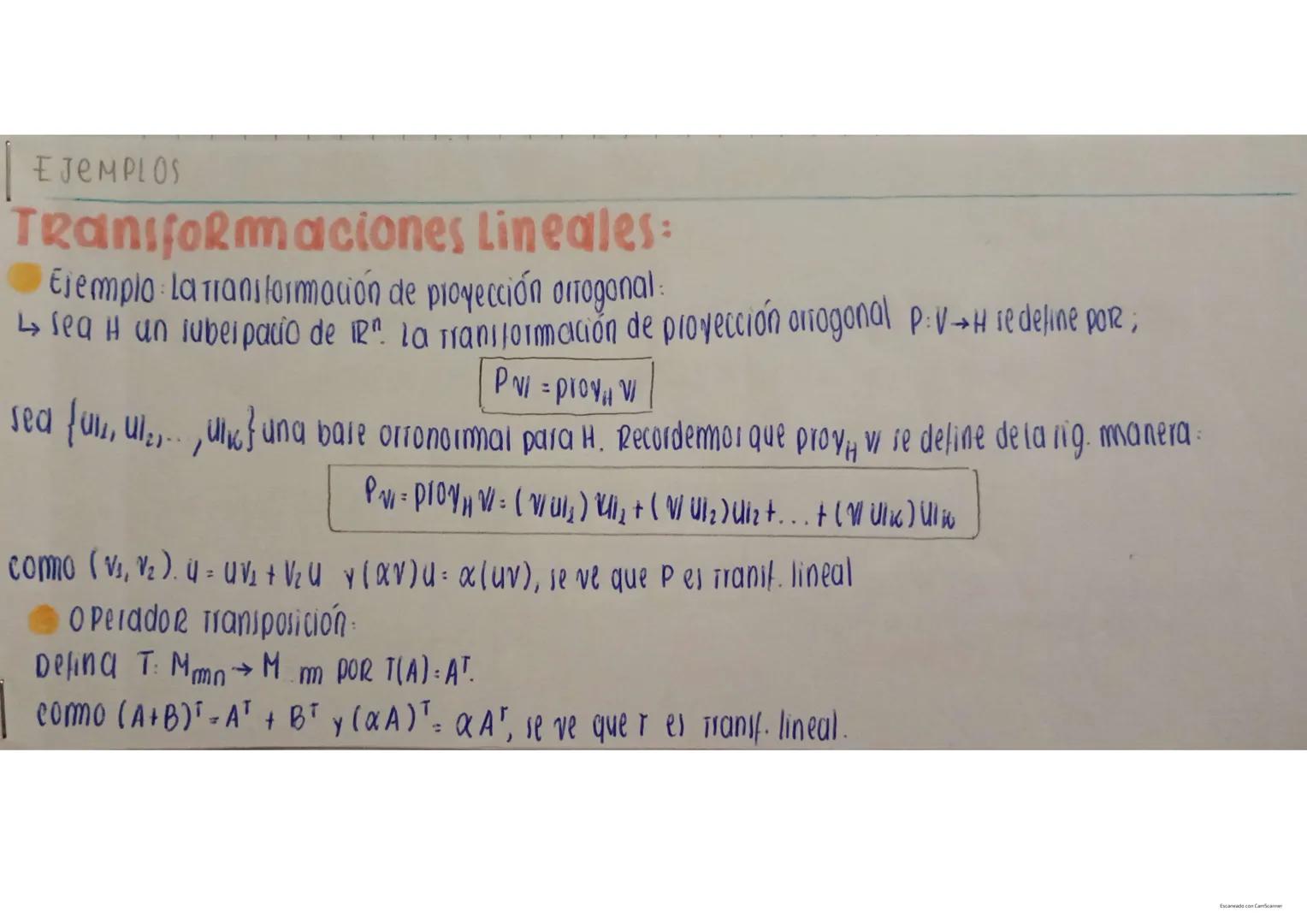
Propiedades Fundamentales
Las transformaciones lineales tienen características que las hacen extremadamente útiles en álgebra lineal y sus aplicaciones. Aquí veremos algunas de sus propiedades más importantes:
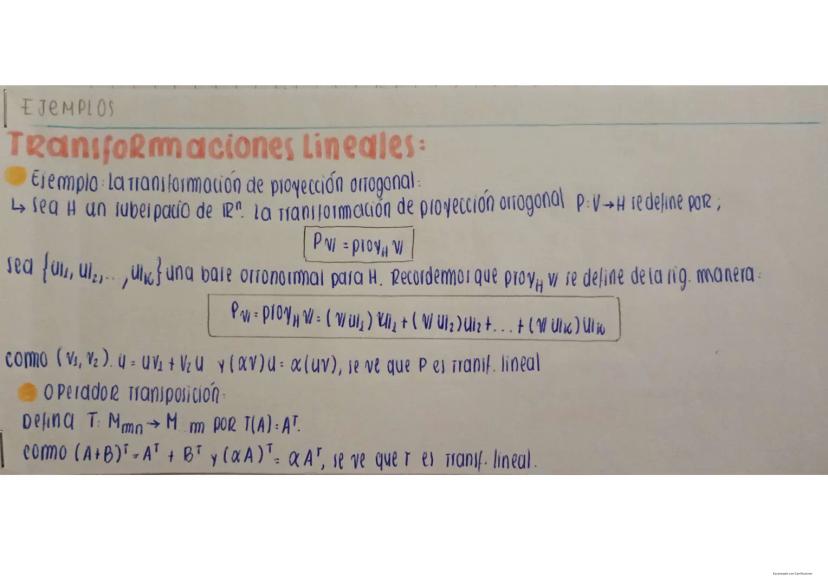
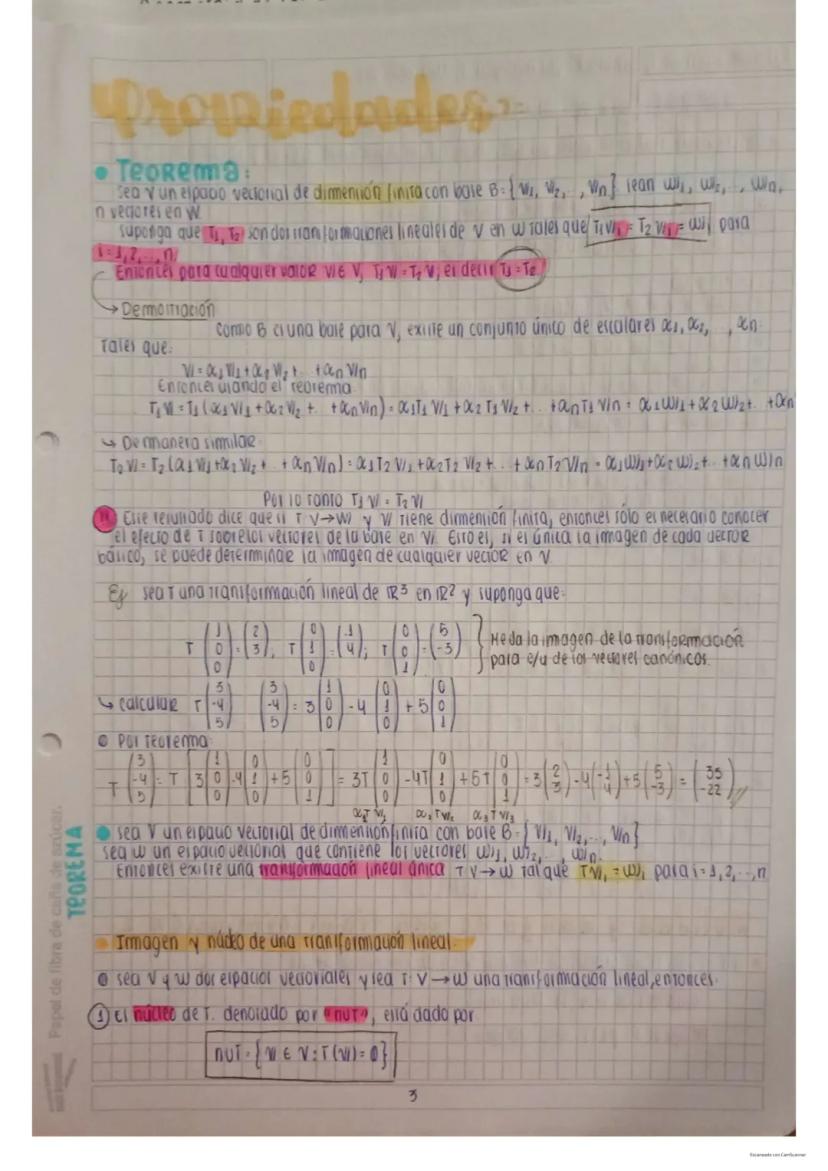
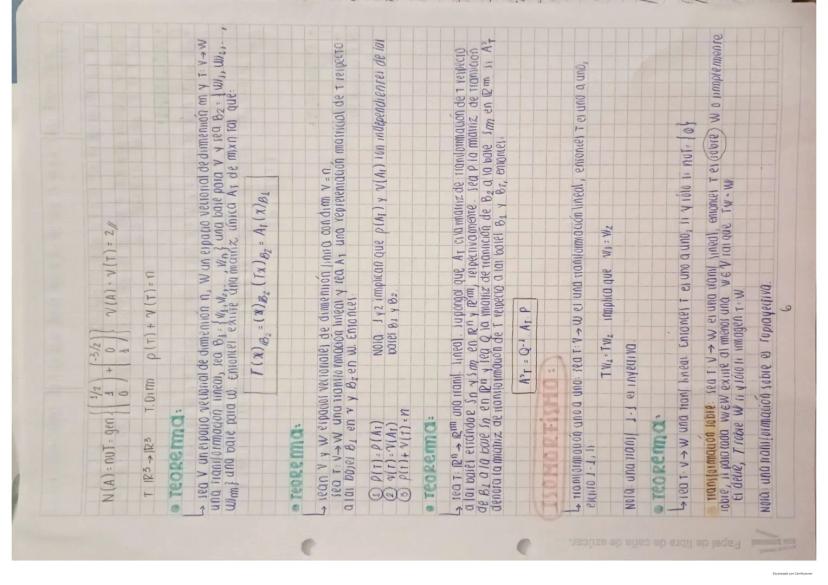
Una transformación lineal queda completamente determinada por lo que hace a los vectores de una base. Esto significa que si conocemos T(v₁), T(v₂), ..., T(vₙ) para una base {v₁, v₂, ..., vₙ}, entonces podemos calcular la transformada de cualquier vector en el espacio.
La proyección ortogonal es un ejemplo importante de transformación lineal. Si H es un subespacio de ℝⁿ con base ortonormal {u₁, u₂, ..., uₖ}, la proyección de un vector w sobre H se define como: P = (w·u₁)u₁ + (w·u₂)u₂ + ... + (w·uₖ)uₖ
🔍 Observación: Las transformaciones lineales preservan las combinaciones lineales. Si T es lineal y v = α₁v₁ + α₂v₂ + ... + αₙvₙ, entonces T = α₁T(v₁) + α₂T(v₂) + ... + αₙT(vₙ).
El operador transposición que convierte una matriz A en su transpuesta A^T es también una transformación lineal. Esto es fácil de comprobar ya que ^T = A^T + B^T y (αA)^T = αA^T.
Estas propiedades nos ayudan a manipular y entender las transformaciones lineales de manera más efectiva, aprovechando la estructura algebraica subyacente de los espacios vectoriales.
4
of 13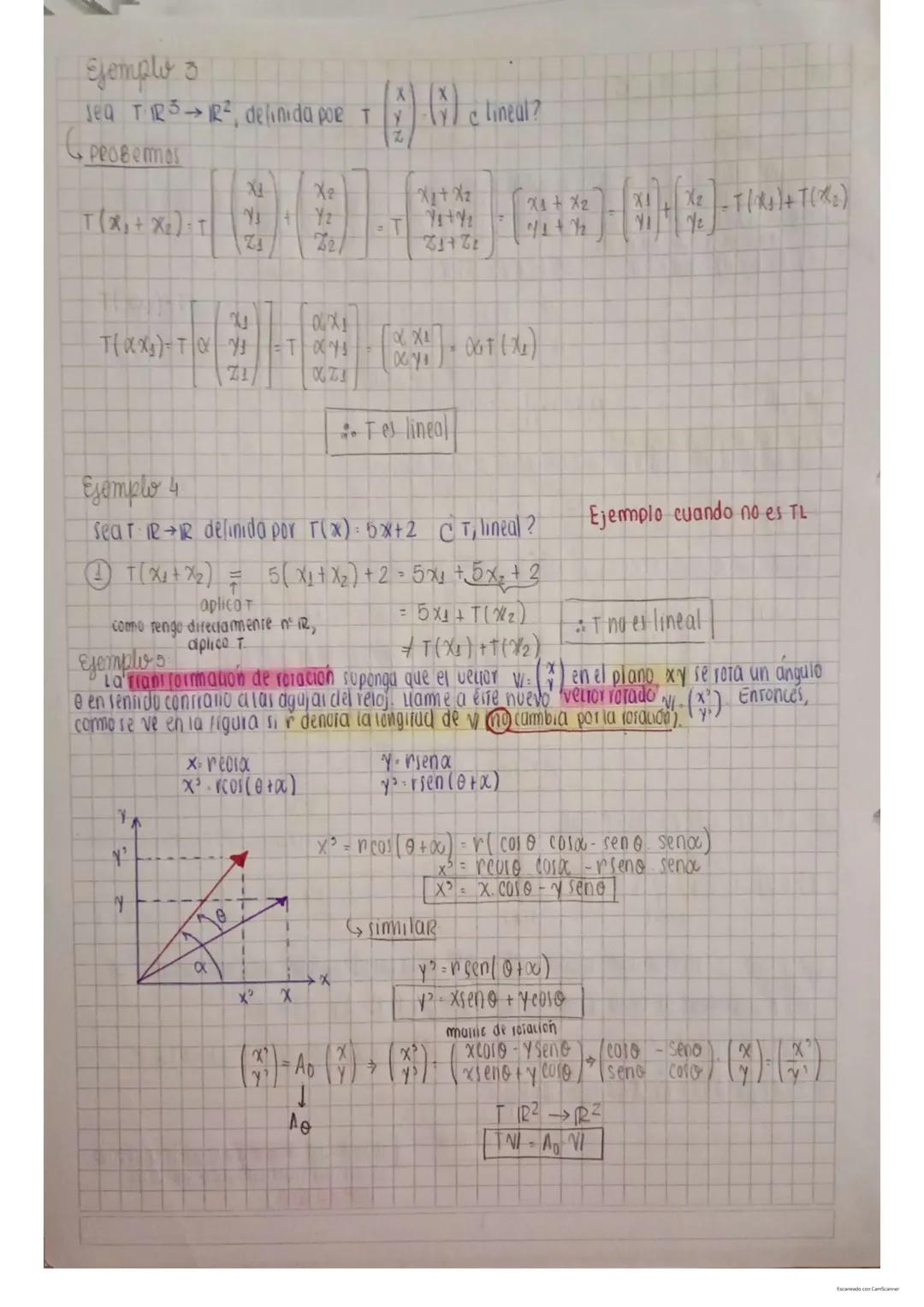
Transformaciones No Lineales y Rotaciones
No todas las transformaciones entre espacios vectoriales son lineales. Es crucial poder identificar cuándo una transformación no cumple las propiedades requeridas:
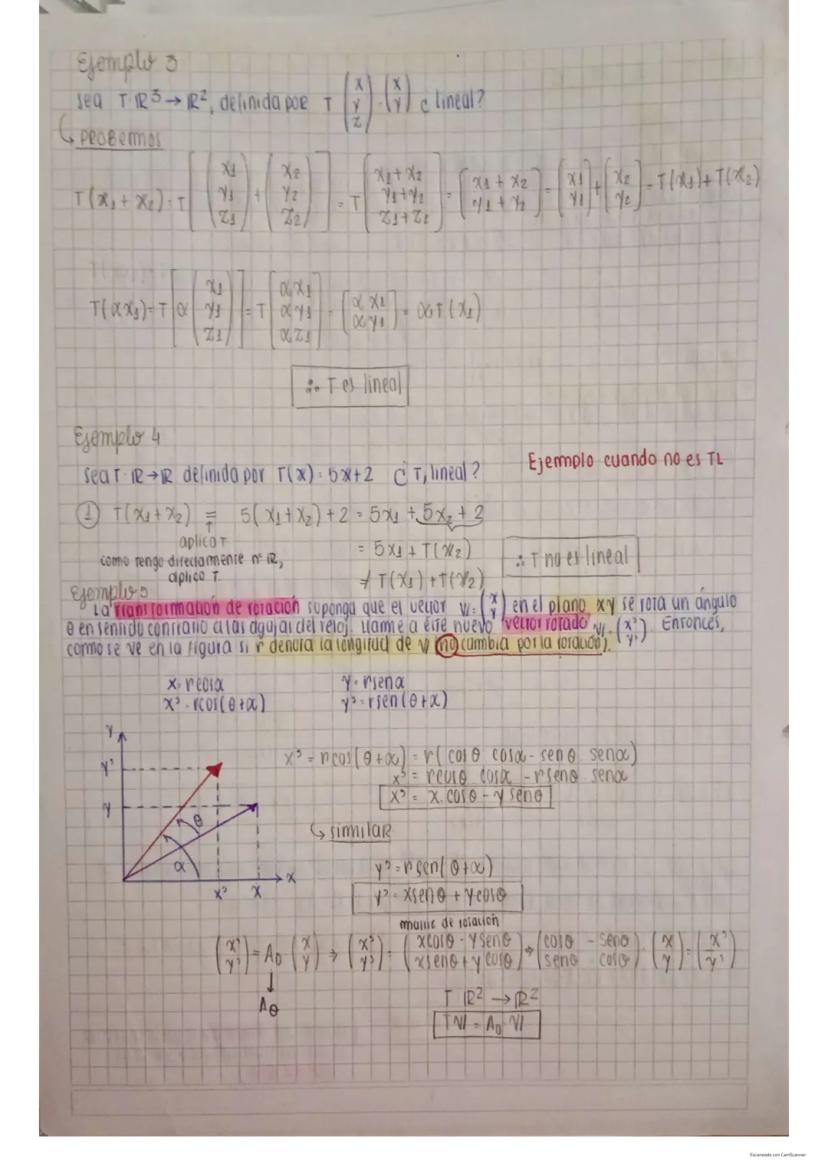
Por ejemplo, la transformación T = 5x + 2 de ℝ a ℝ no es lineal. Si verificamos la primera propiedad: T = 5 + 2 = 5x₁ + 5x₂ + 2 Mientras que T(x₁) + T(x₂) = + = 5x₁ + 5x₂ + 4
Como 5x₁ + 5x₂ + 2 ≠ 5x₁ + 5x₂ + 4, esta transformación no es lineal.
⚠️ Atención: Cualquier función con un término constante nunca será una transformación lineal, pues rompe la propiedad T(0) = 0.
La transformación de rotación es un caso especial que merece atención detallada. Cuando rotamos un vector (x,y) un ángulo θ, las nuevas coordenadas (x',y') están dadas por: x' = r·cos = x·cos(θ) - y·sen(θ) y' = r·sen = x·sen(θ) + y·cos(θ)
Estas ecuaciones pueden expresarse en forma matricial como: [x'] [cos(θ) -sen(θ)] [x] [y'] = [sen(θ) cos(θ)] [y]
La rotación preserva la norma del vector , lo que la convierte en una isometría, un tipo especial de transformación lineal que preserva distancias.
5
of 13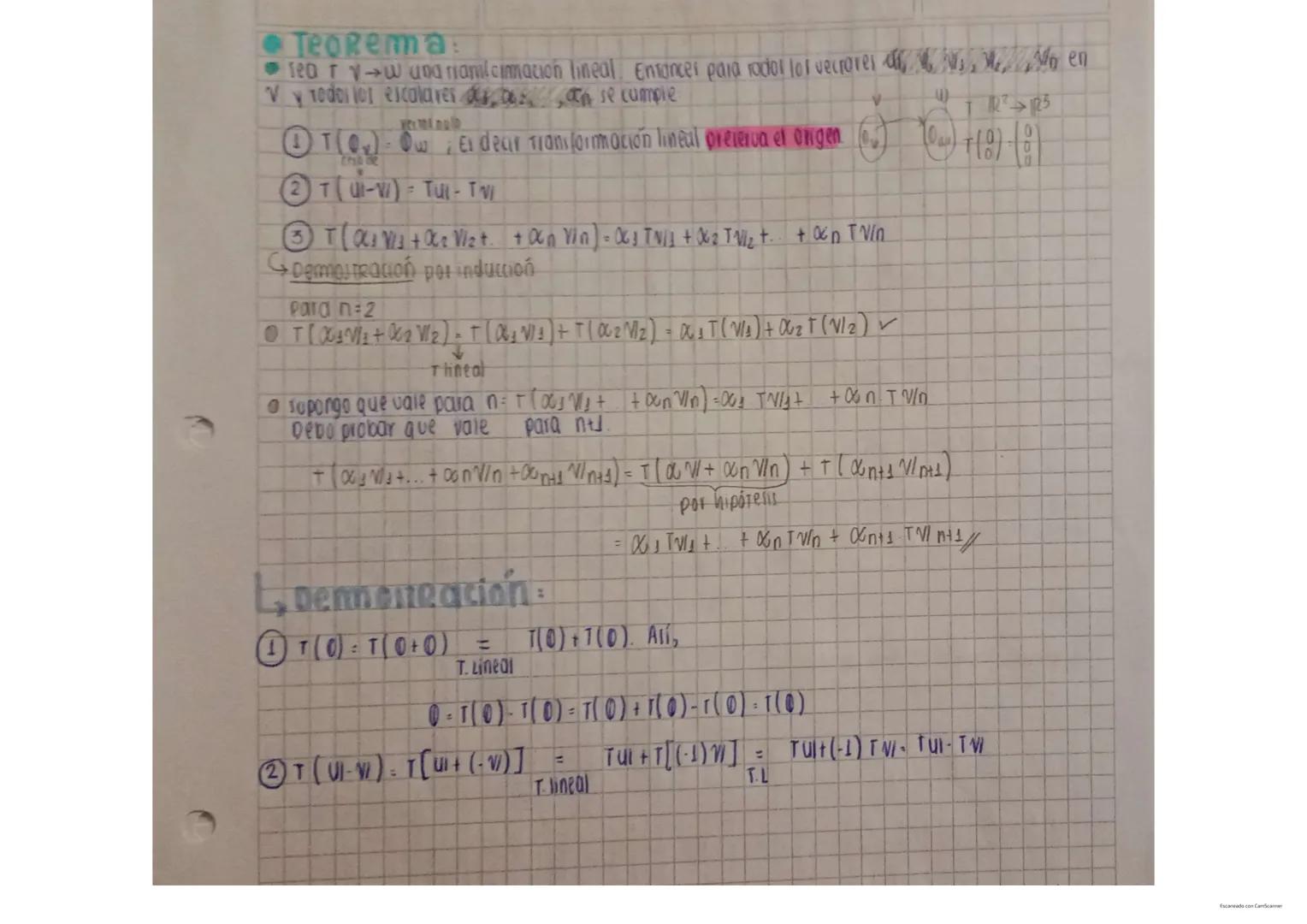
Teoremas Fundamentales
Los teoremas sobre transformaciones lineales nos permiten entender su comportamiento y propiedades de manera más profunda:
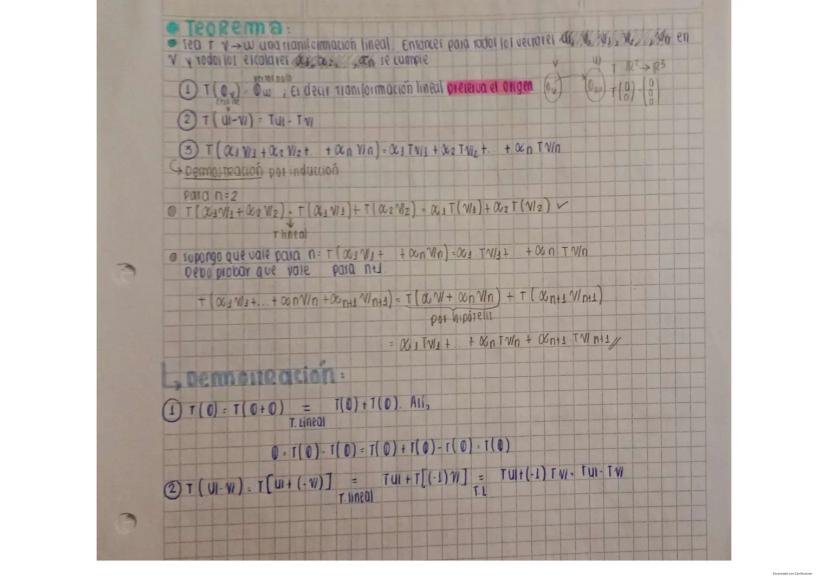
El primer teorema fundamental establece que toda transformación lineal preserva combinaciones lineales. Si T es una transformación lineal, entonces:
- T(0) = 0
- T = T - T
- T = α₁T(v₁) + α₂T(v₂) + ... + αₙT(vₙ)
Estas propiedades se derivan directamente de la definición y pueden demostrarse fácilmente por inducción.
🌟 Concepto clave: Una transformación lineal queda completamente determinada por cómo transforma los vectores de una base. Dos transformaciones que coinciden en los vectores de una base son idénticas.
La demostración de este teorema es directa: si dos transformaciones T₁ y T₂ transforman igual a los vectores de una base {v₁, v₂, ..., vₙ}, entonces para cualquier vector v = α₁v₁ + α₂v₂ + ... + αₙvₙ:
T₁ = α₁T₁(v₁) + α₂T₁(v₂) + ... + αₙT₁(vₙ) = α₁T₂(v₁) + α₂T₂(v₂) + ... + αₙT₂(vₙ) = T₂
Esto simplifica enormemente el trabajo con transformaciones lineales, pues solo necesitamos conocer su efecto en los vectores de una base para determinar completamente su comportamiento.
6
of 13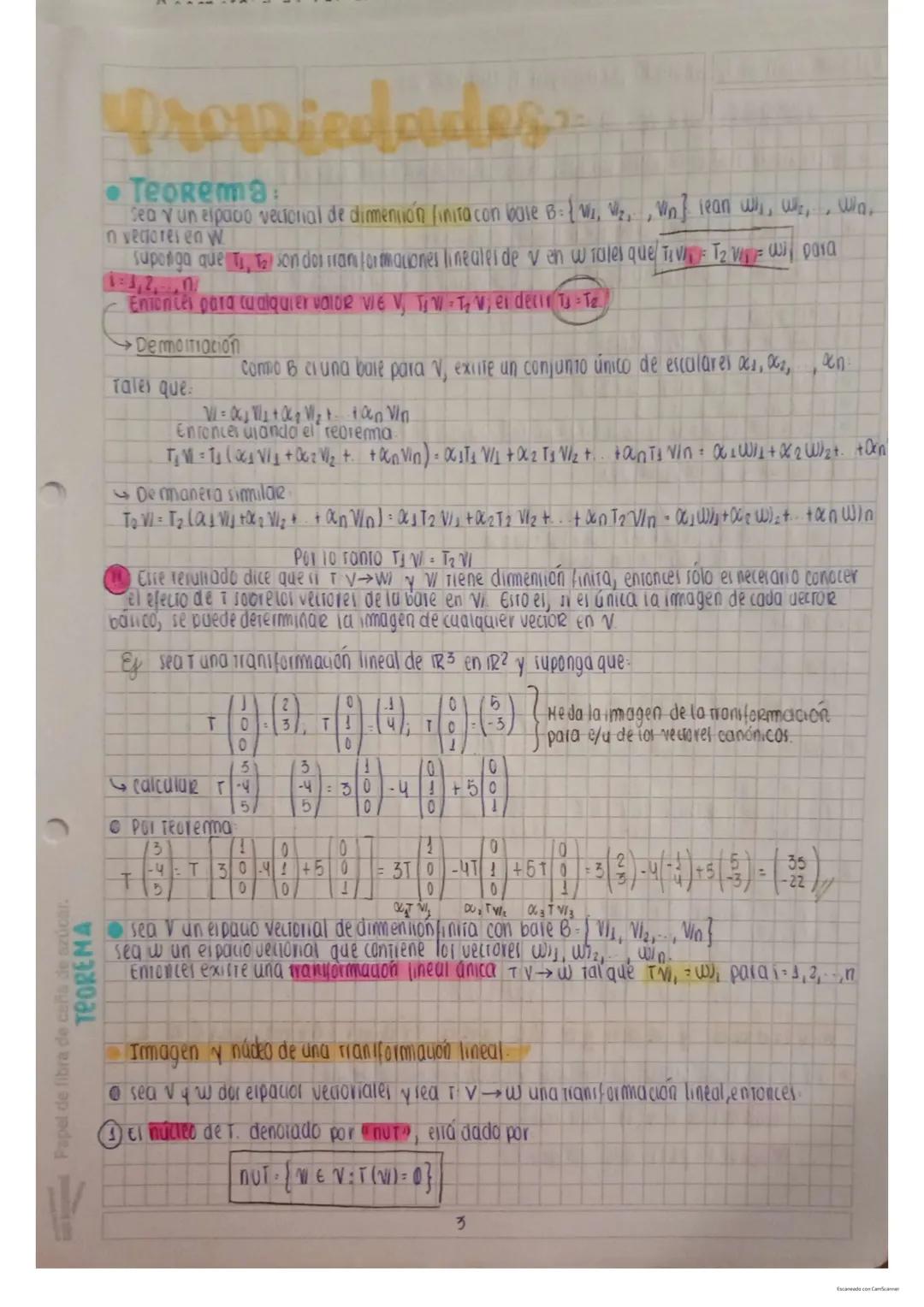
Imagen y Núcleo
Dos conceptos fundamentales para entender transformaciones lineales son la imagen y el núcleo:
El núcleo de una transformación lineal T: V → W (denotado como Nuc T) es el conjunto de todos los vectores en V que T mapea al vector cero de W: Nuc T = {v ∈ V | T = 0}
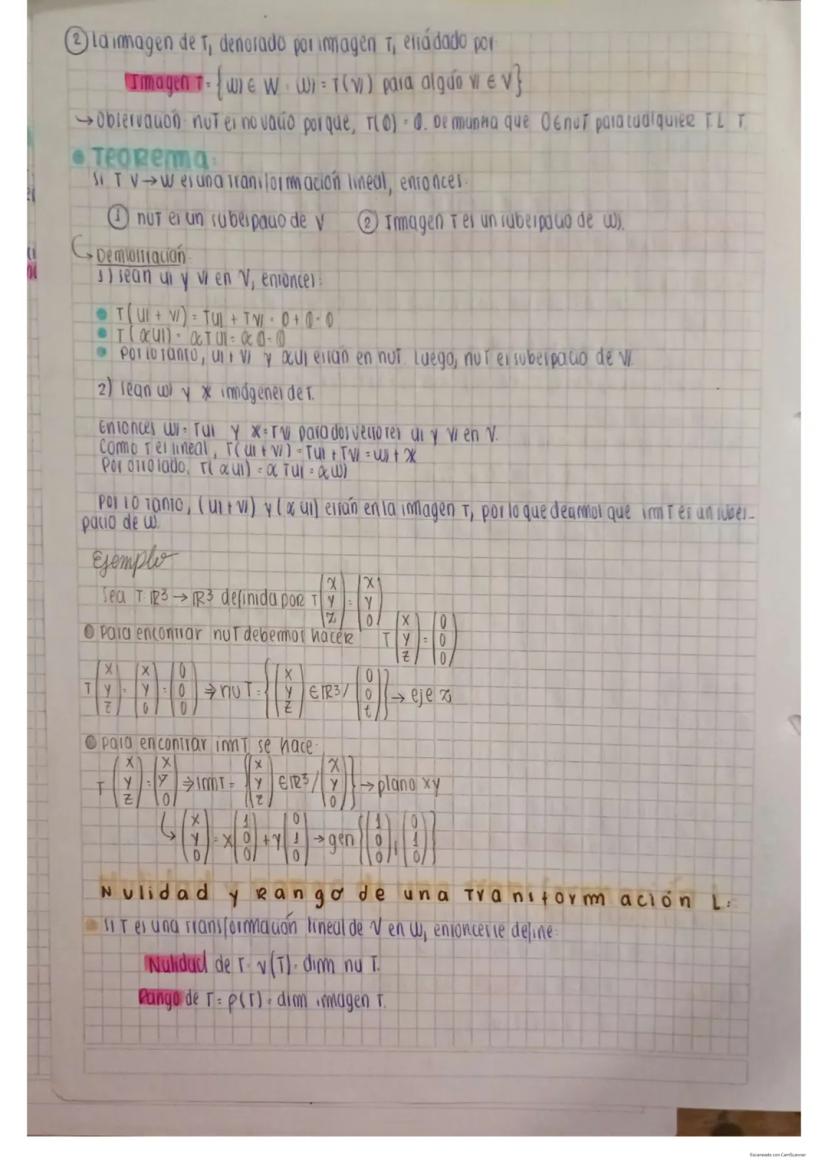
La imagen de T (denotada como Im T) es el conjunto de todos los vectores en W que son resultado de aplicar T a algún vector de V: Im T = {w ∈ W | w = T para algún v ∈ V}
📌 Importante: El núcleo siempre contiene al menos el vector cero, ya que T(0) = 0 para toda transformación lineal.
Un teorema esencial establece que tanto el núcleo como la imagen de una transformación lineal son subespacios vectoriales. Esto significa que:
- El núcleo es subespacio del dominio V
- La imagen es subespacio del codominio W
La dimensión del núcleo se llama nulidad de T: v(T) = dim(Nuc T) La dimensión de la imagen se llama rango de T: ρ(T) = dim(Im T)
Estas dimensiones están relacionadas por el Teorema de la Dimensión, que establece: ρ(T) + v(T) = dim(V)
Este teorema es fundamental y nos permite calcular una dimensión conociendo las otras, ofreciendo una visión profunda de cuánta información se preserva o se pierde en la transformación.
7
of 13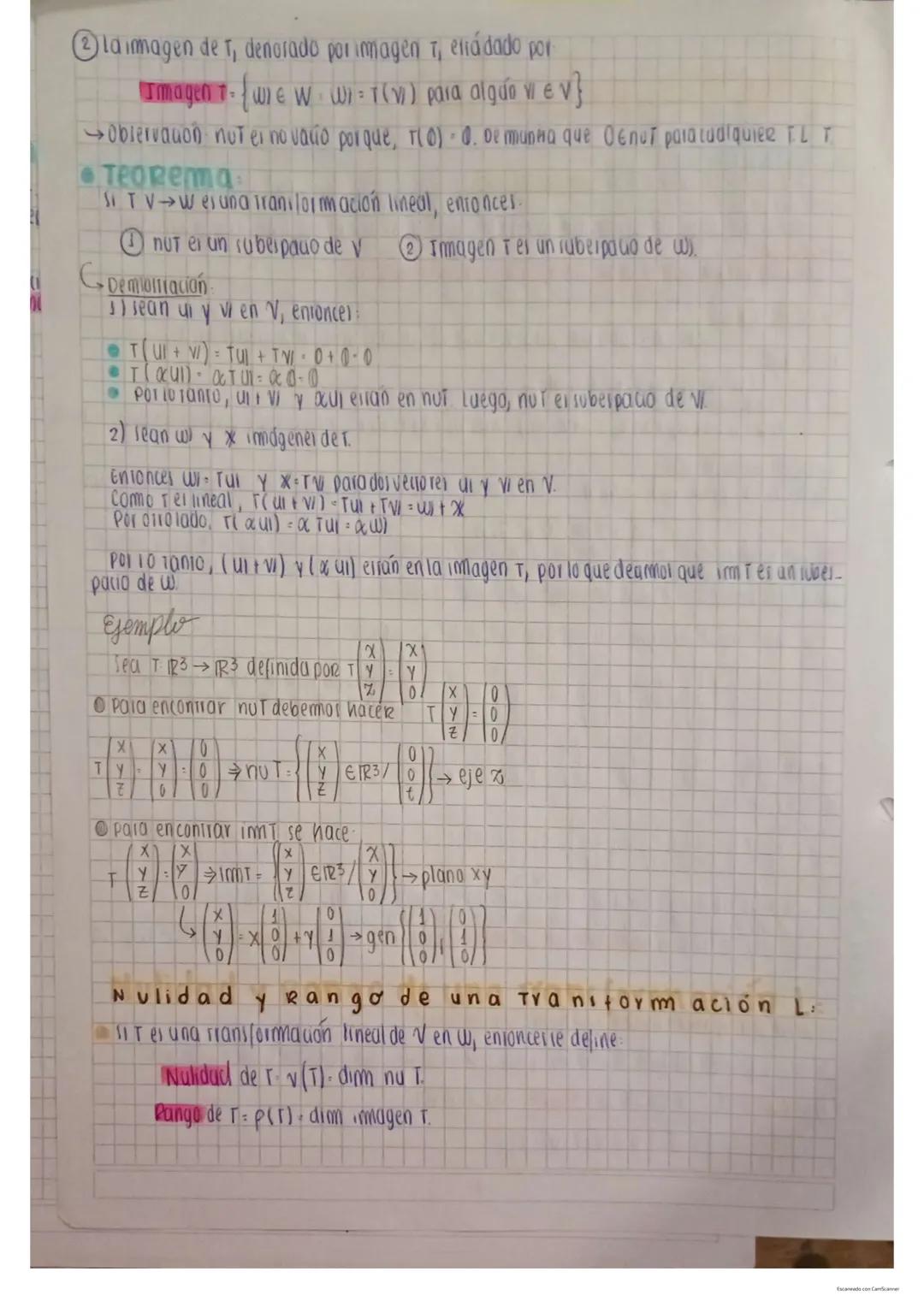
Propiedades de Núcleo e Imagen
El núcleo y la imagen de una transformación lineal tienen propiedades importantes que facilitan el análisis de transformaciones:
Para determinar el núcleo de una transformación, buscamos todos los vectores que se transforman en cero. Por ejemplo, si T: ℝ³ → ℝ² está definida por T(x,y,z) = (x,y,0), el núcleo serían todos los vectores de la forma (0,0,z), que corresponde al eje z.
Para encontrar la imagen, identificamos todos los posibles resultados de la transformación. En el ejemplo anterior, la imagen sería el plano xy en ℝ².
🧮 Cálculo práctico: Para transformaciones en espacios finitos, podemos calcular núcleo e imagen usando la matriz asociada a la transformación y aplicando técnicas de reducción Gaussiana.
El teorema que relaciona núcleo, imagen y dimensiones establece que:
- La nulidad v(T) = dimensión del núcleo
- El rango ρ(T) = dimensión de la imagen
- v(T) + ρ(T) = dim(V)
Este resultado es poderoso porque nos permite determinar, por ejemplo, cuánta información se pierde en una transformación. Si el núcleo solo contiene al vector cero, la transformación es inyectiva (no hay pérdida de información). Si la imagen coincide con todo W, la transformación es sobreyectiva (alcanza todos los posibles resultados).
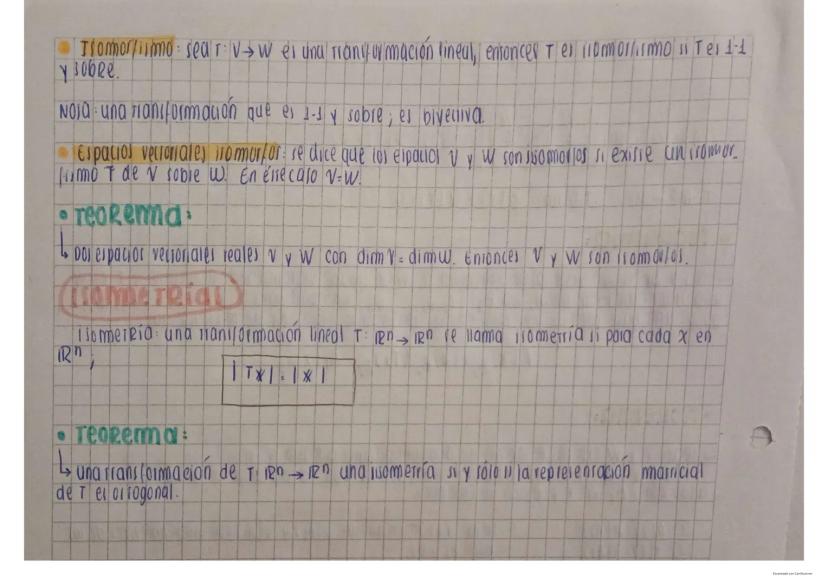
Una transformación que es tanto inyectiva como sobreyectiva se denomina isomorfismo, y establece que los espacios V y W son esencialmente "el mismo" desde un punto de vista algebraico.
8
of 13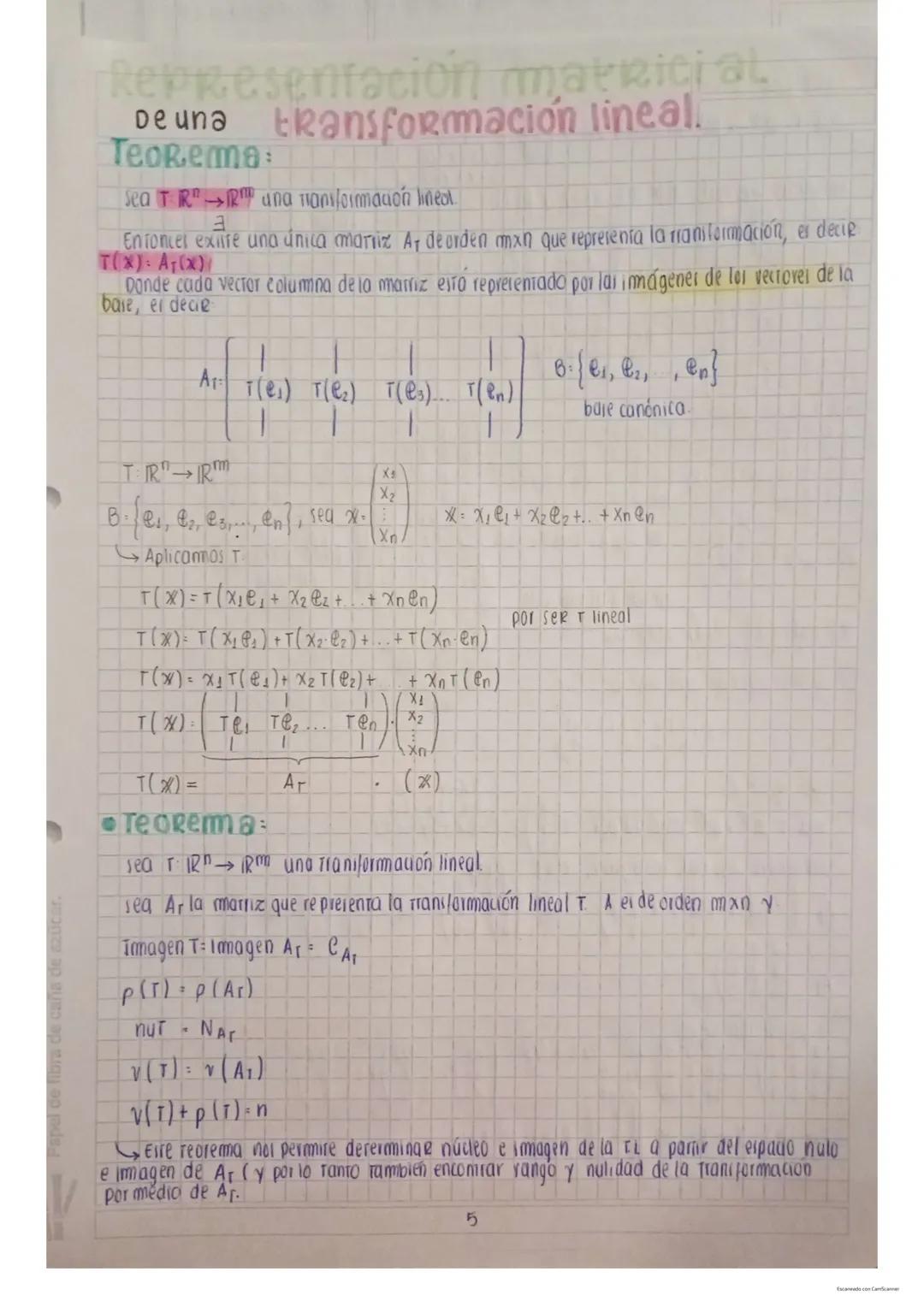
Representación Matricial
Una de las ventajas de las transformaciones lineales es que pueden representarse mediante matrices, lo que facilita su estudio y aplicación:
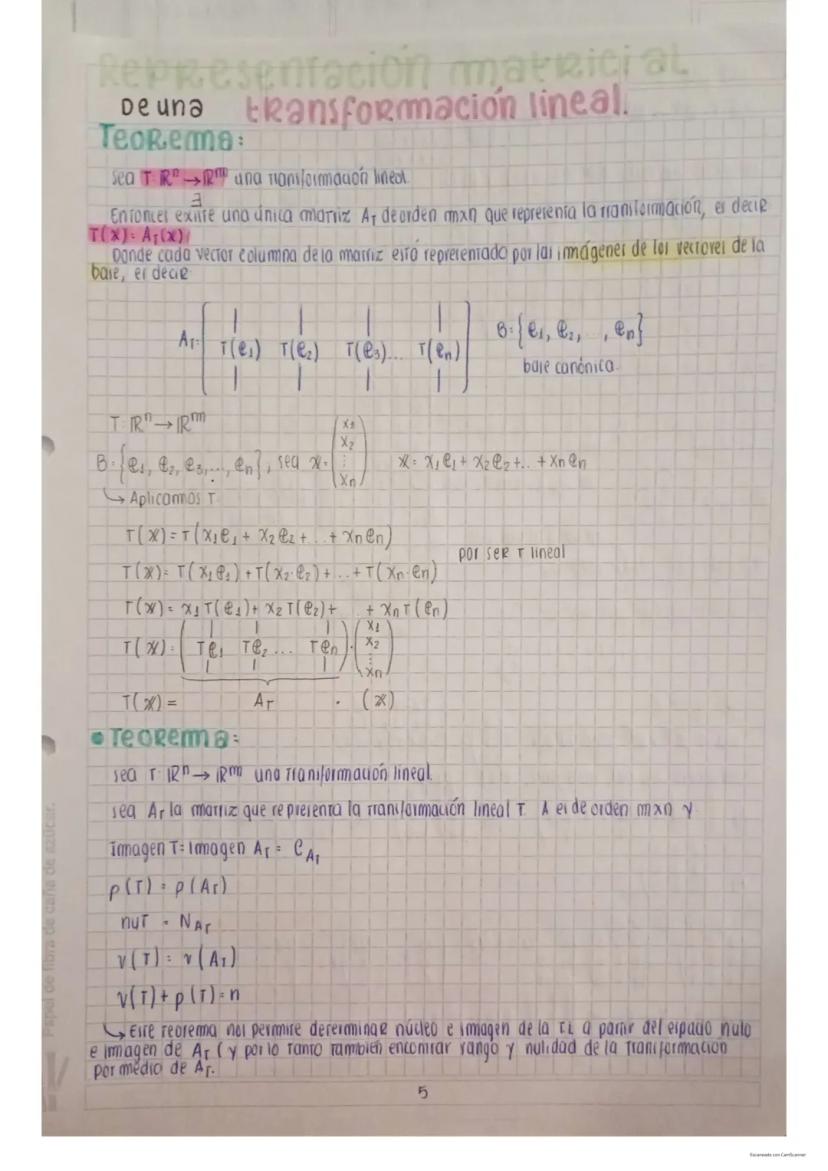
Para una transformación lineal T: ℝⁿ → ℝᵐ, existe una única matriz A_T de dimensión m×n tal que: T = A_T·x
Esta matriz se construye colocando como columnas las transformaciones de los vectores de la base canónica: A_T = [T(e₁) T(e₂) ... T(eₙ)]
🔄 Proceso práctico: Para encontrar la matriz de una transformación, solo necesitas calcular cómo transforma cada vector de la base canónica y colocar estos resultados como columnas de la matriz.
El razonamiento detrás de esta representación es sencillo. Si x = x₁e₁ + x₂e₂ + ... + xₙeₙ, entonces: T = T = x₁T(e₁) + x₂T(e₂) + ... + xₙT(eₙ)
Esta última expresión corresponde exactamente al producto matricial A_T·x.
La representación matricial nos permite usar todas las herramientas del álgebra matricial para estudiar transformaciones lineales. Por ejemplo, podemos afirmar que:
- La imagen de T coincide con el espacio columna de A_T
- El núcleo de T coincide con el espacio nulo de A_T
- El rango de T es igual al rango de A_T
- La nulidad de T es igual a la nulidad de A_T
Estos resultados confirman la poderosa relación entre transformaciones lineales y matrices.
9
of 13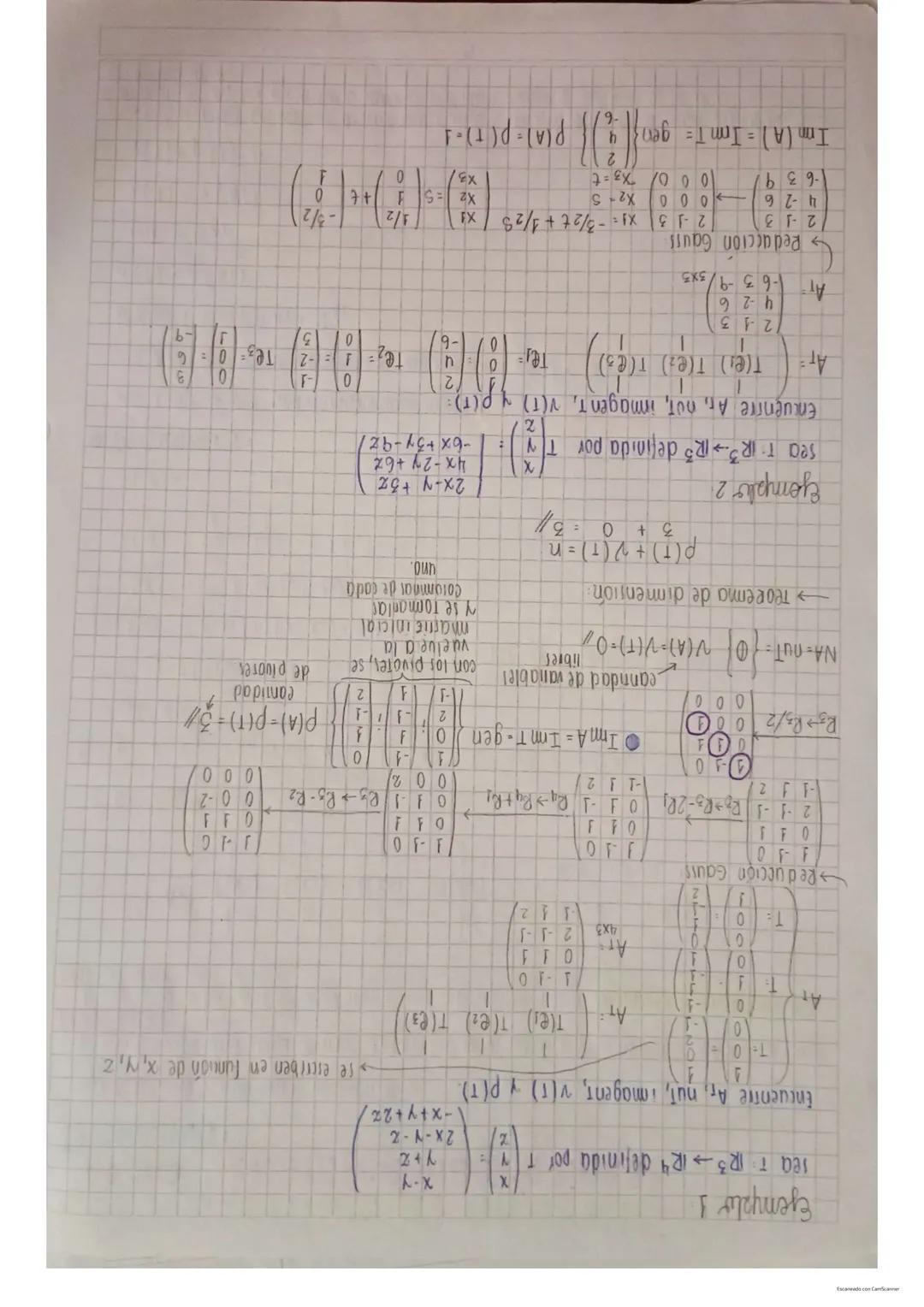
Ejemplos Prácticos
Veamos cómo aplicar los conceptos teóricos a ejemplos concretos de transformaciones lineales:
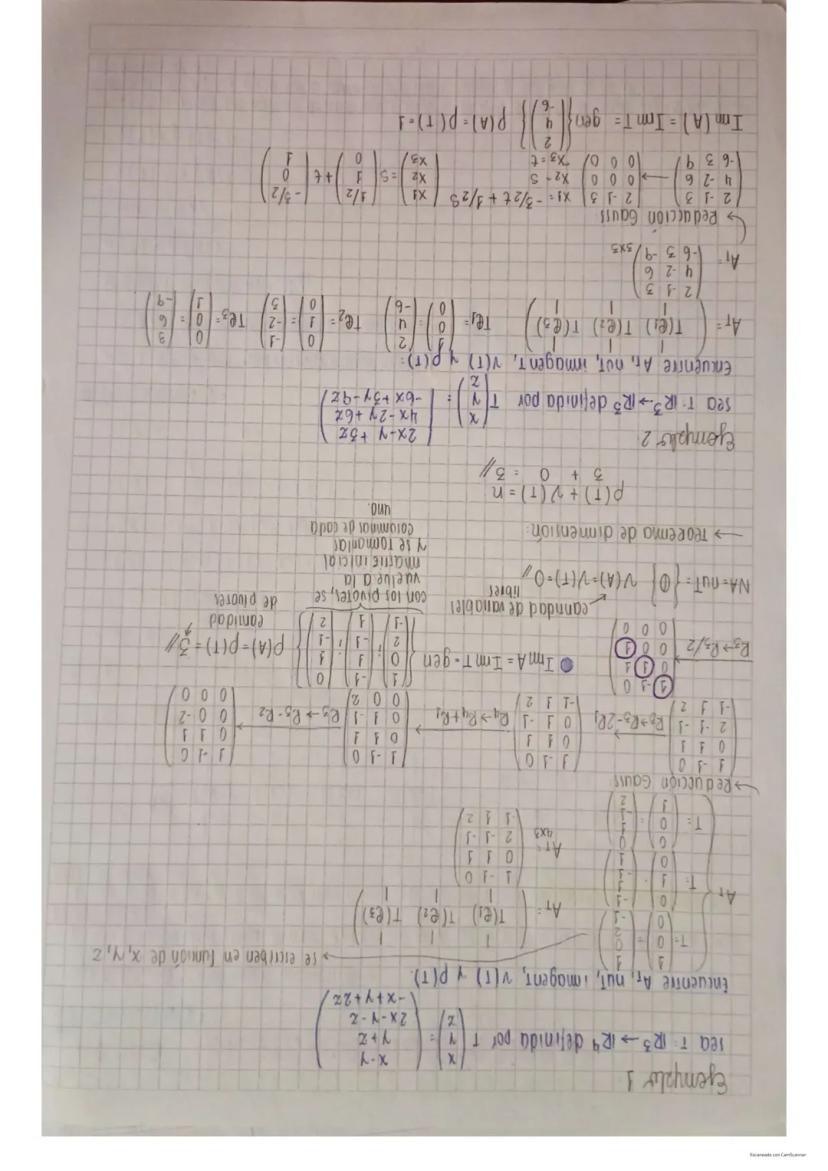
Ejemplo 1: Sea T: ℝ³ → ℝ⁴ definida por: T(x,y,z) =
Para encontrar la matriz A_T, calculamos la transformación de cada vector de la base canónica: T(1,0,0) = T(0,1,0) = T(0,0,1) = (0, 2, 0, 1)
Por lo tanto: A_T = [ 1 -1 0 -1 1 2 1 0 0 0 0 1 ]
🔍 Verificación: Podemos comprobar que T = A_T · ᵀ
Para encontrar núcleo e imagen, reducimos la matriz a forma escalonada: [ 1 -1 0 0 0 1 0 0 0 0 0 0 ]
De aquí deducimos que:
- El rango es 2 (hay 2 filas no nulas)
- La imagen de T es un subespacio bidimensional de ℝ⁴
- La nulidad es 1 (3 variables - 2 pivotes)
- El núcleo está generado por el vector (1,1,0)
Esto confirma el Teorema de la Dimensión: ρ(T) + v(T) = 2 + 1 = 3 = dim(ℝ³)
10
of 13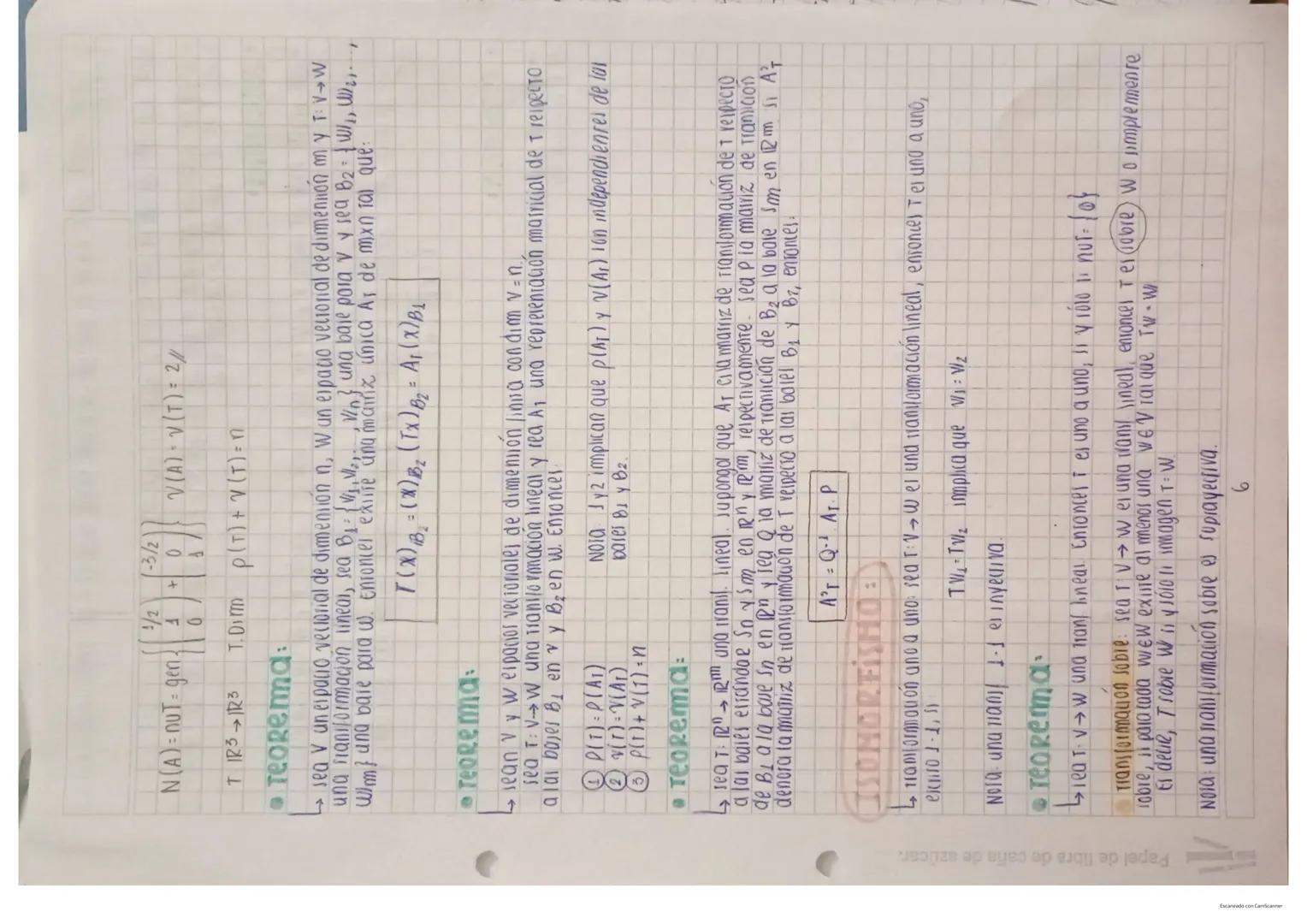
Cambios de Base e Isomorfismos
Las transformaciones lineales pueden representarse con matrices diferentes según las bases elegidas para los espacios vectoriales:
Si T: V → W es una transformación lineal, y escogemos bases B₁ para V y B₂ para W, existe una única matriz A_T que representa T respecto a estas bases. Si cambiamos a otras bases, la matriz de representación también cambia.
Si P es la matriz de transición de la base B₁ a la base estándar y Q es la matriz de transición de B₂ a la base estándar, entonces: A'_T = Q⁻¹·A_T·P
🌐 Conceptos avanzados: Aunque la matriz que representa una transformación depende de las bases elegidas, propiedades como el rango y la nulidad son invariantes.
Un isomorfismo es una transformación lineal que es tanto inyectiva como sobreyectiva (es decir, su núcleo solo contiene al vector cero y su imagen es todo el espacio de llegada). Dos espacios vectoriales son isomorfos si existe un isomorfismo entre ellos.
Un teorema fundamental establece que dos espacios vectoriales reales son isomorfos si y solo si tienen la misma dimensión. Esto significa que, desde un punto de vista algebraico, todos los espacios vectoriales reales de la misma dimensión son "el mismo espacio".
Las isometrías son transformaciones lineales que preservan la norma (distancia). En ℝⁿ, una transformación es una isometría si y solo si su matriz representativa es ortogonal. Ejemplos típicos incluyen rotaciones y reflexiones.
Estos conceptos avanzados son fundamentales para entender la estructura profunda de las transformaciones lineales y sus aplicaciones.
11
of 13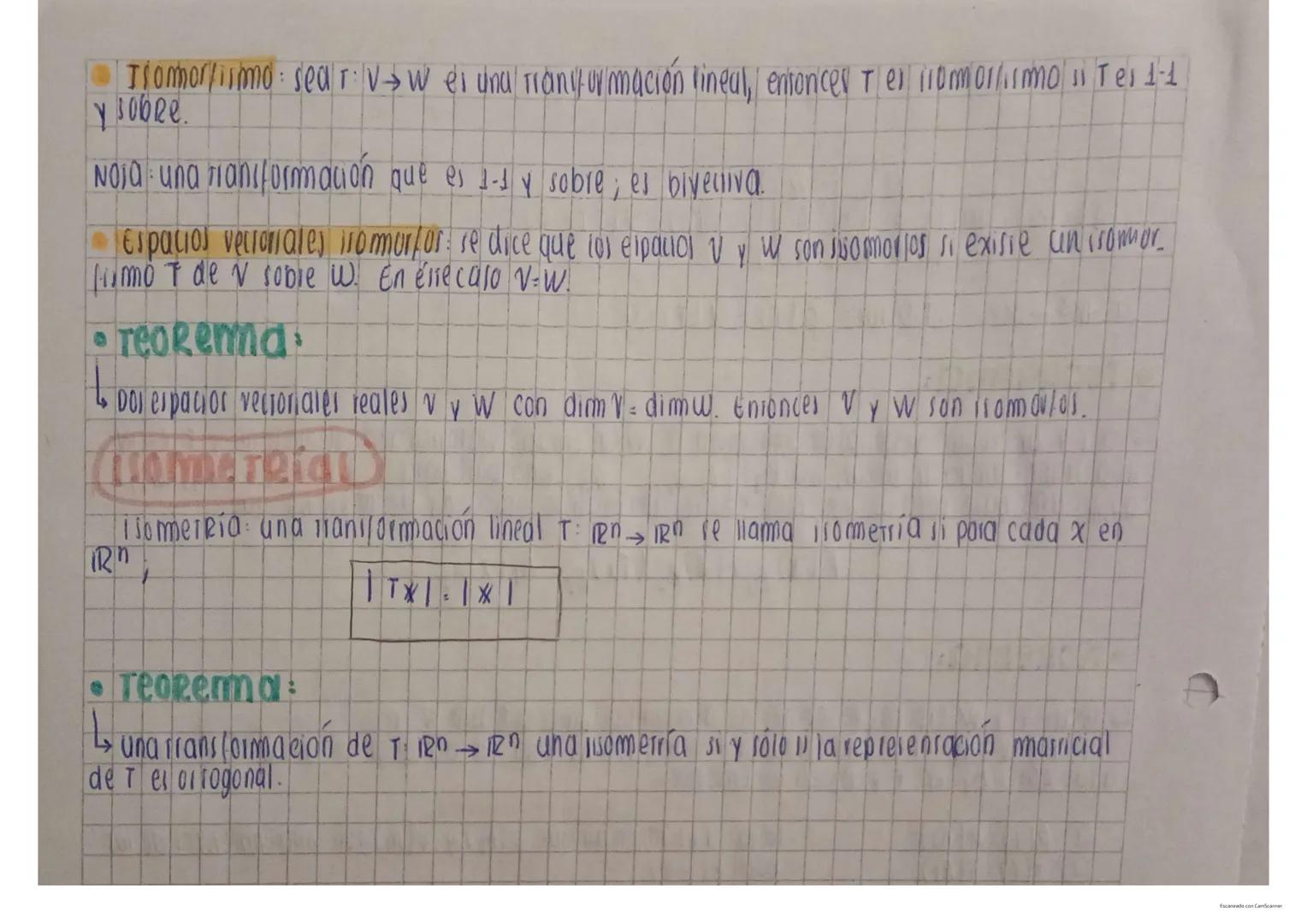
12
of 13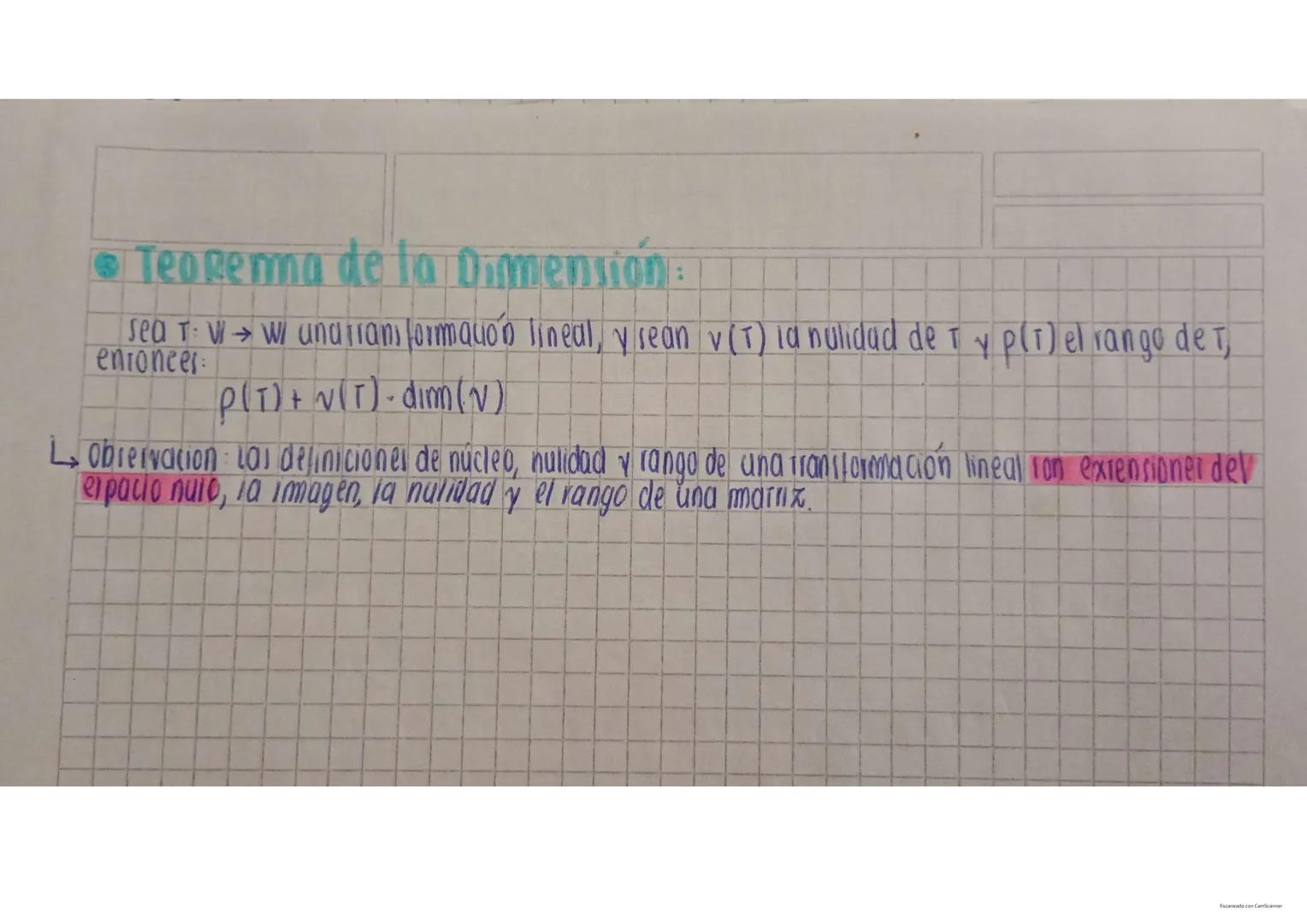
13
of 13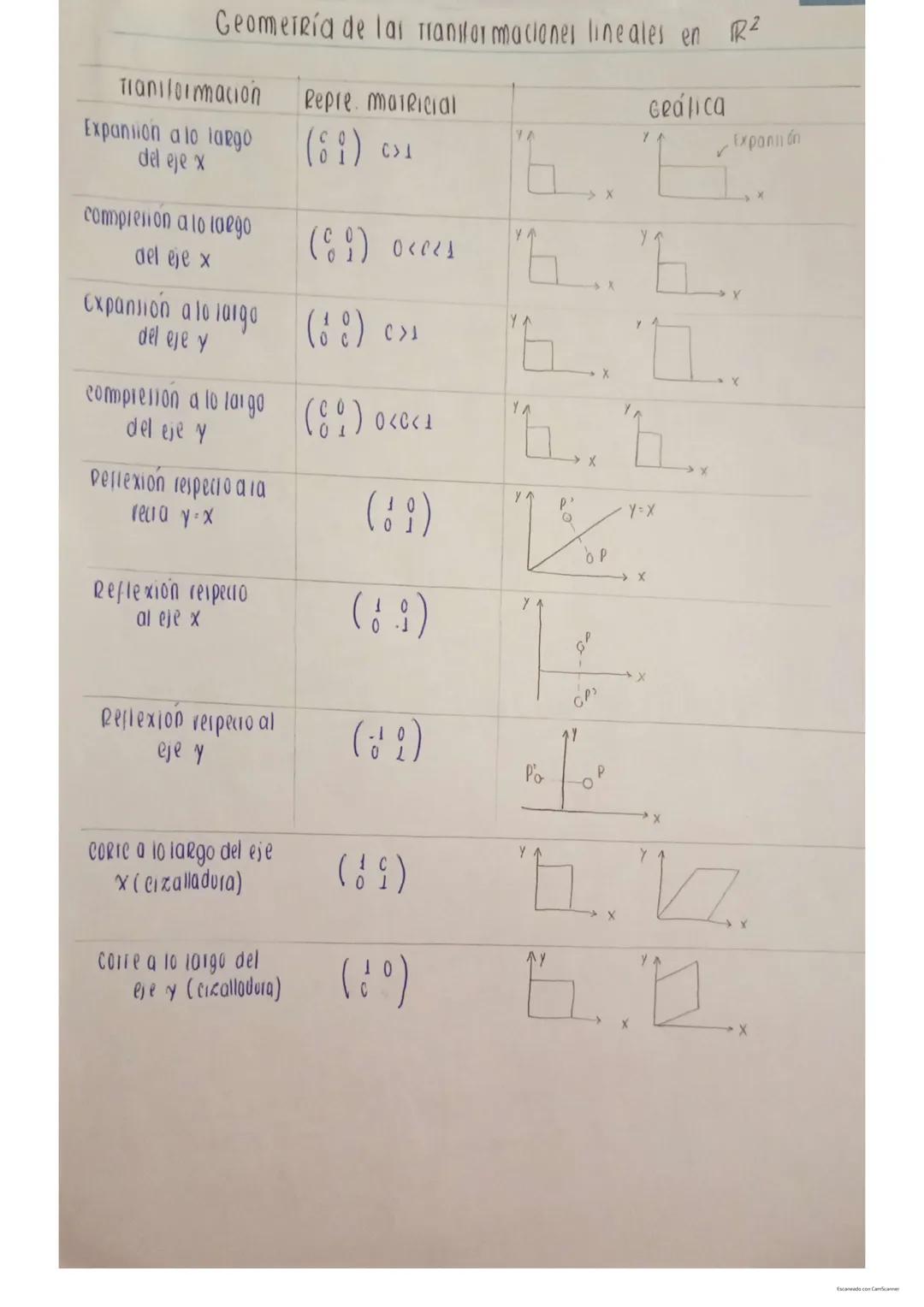
Pensamos que nunca lo preguntarías...
Nuestro compañero de IA está específicamente adaptado a las necesidades de los estudiantes. Basándonos en los millones de contenidos que tenemos en la plataforma, podemos dar a los estudiantes respuestas realmente significativas y relevantes. Pero no se trata solo de respuestas, el compañero también guía a los estudiantes a través de sus retos de aprendizaje diarios, con planes de aprendizaje personalizados, cuestionarios o contenidos en el chat y una personalización del 100% basada en las habilidades y el desarrollo de los estudiantes.
Puedes descargar la app en Google Play Store y Apple App Store.
¡Sí lo es! Tienes acceso totalmente gratuito a todo el contenido de la app, puedes chatear con otros alumnos y recibir ayuda inmeditamente. Puedes ganar dinero utilizando la aplicación, que te permitirá acceder a determinadas funciones.
Contenido similar
Contenidos más populares: Linear Independence
1Contenidos más populares de Matemáticas
9Función cuadrática: Fórmulas y Análisis de la parábola.
Resumen teórico-práctico sobre la función cuadrática, sus fórmulas principales y el estudio de la parábola como representación gráfica.Incluye desarrollo de la forma general, cálculo de raíces, vértice y elementos fundamentales para su interpretación
4°2693
M
matematicas
ecuaciones
2°3220
resumen de análisis gráficos y ejes
resumen de ejes y análisis de gráfico
3°2743
ecuación
nosenada
2°2201
Ecuaciones Lineales: Resolución Paso a Paso
Una guía detallada para resolver ecuaciones lineales de una variable, con ejemplos y pasos claros.
2°3,24327
Matemáticas
Como pasar de numero mixto y fracción y viceversa. Fracciones equivalentes.
1°49311
Lenguaje coloquial y simbólico
Primer trabajo 1
1°1731
Matemáticas.
Tema de geometria 4 año.
4°1111
REGLA DE SIGNOS
Matematicas, multiplicación y división, suma y resta.
2°2743
Contenidos más populares
9C
celula eucriota, membrana plasmática, núcleo, pared celular, citoplasma y citoesqueletos. nombre se las partes de la celula eucariota
Este quiz evalúa tu conocimiento sobre la célula eucariota, incluyendo la membrana plasmática, núcleo, pared celular, citoplasma y citoesqueleto.
2°4850
Simple present
Estructura del present simple/simple present
1°4817
Resumen gramática inglesa B2
Contiene los temas básicos necesarios para el FCE
6°4555
Geografía 1er año
definición geografía-coordenadas geográficas-meridianos-paralelos-definición latitud y longitud-elementos del mapa-definición mapa-localización relativa y absoluta
1°2843
Contines y océanos
Geografía
1°4302
Análisis sintáctico de oraciones
explicación de el análisis de oraciones
2°51010
🪻✨️verbo to be✨️🪻
Verbo tobe para estudiar simple y facil
1°2692
Biologia
Fases
Universidad96314
Función cuadrática: Fórmulas y Análisis de la parábola.
Resumen teórico-práctico sobre la función cuadrática, sus fórmulas principales y el estudio de la parábola como representación gráfica.Incluye desarrollo de la forma general, cálculo de raíces, vértice y elementos fundamentales para su interpretación
4°2693
Mira lo que dicen nuestros usuarios. Les encantó — y a ti también te encantará.
4.6/5App Store
4.7/5Google Play
La app es muy fácil de usar y está muy bien diseñada. Hasta ahora he encontrado todo lo que estaba buscando y he podido aprender mucho de las presentaciones. Definitivamente utilizaré la aplicación para un examen de clase. Y, por supuesto, también me sirve mucho de inspiración.
Pablousuario de iOS
Esta app es realmente genial. Hay tantos apuntes de clase y ayuda [...]. Tengo problemas con matemáticas, por ejemplo, y la aplicación tiene muchas opciones de ayuda. Gracias a Knowunity, he mejorado en mates. Se la recomiendo a todo el mundo.
Elenausuaria de Android
Vaya, estoy realmente sorprendida. Acabo de probar la app porque la he visto anunciada muchas veces y me he quedado absolutamente alucinada. Esta app es LA AYUDA que quieres para el insti y, sobre todo, ofrece muchísimas cosas, como ejercicios y hojas informativas, que a mí personalmente me han sido MUY útiles.
Anausuaria de iOS
Entendiendo las Transformaciones Lineales
Alex Germán Luna@aalexxluna
Las transformaciones lineales son funciones entre espacios vectoriales que preservan las operaciones fundamentales de suma y multiplicación por escalar. Estas herramientas matemáticas son esenciales para comprender cómo se relacionan distintos espacios vectoriales y cómo los vectores pueden transformarse de forma...
1
of 13
Inscríbete para ver los apuntes. ¡Es gratis!
- Acceso a todos los documentos
- Mejora tus notas
- Únete a millones de estudiantes
Al registrarte aceptas las Condiciones del servicio y la Política de privacidad.
Transformación Lineal
Una transformación lineal es una función entre dos espacios vectoriales que mantiene la estructura algebraica. Si tenemos espacios vectoriales V y W, una transformación T: V → W asigna a cada vector en V exactamente un vector en W, cumpliendo dos propiedades fundamentales:
- T = T + T - Preserva sumas
- T(αv) = αT - Preserva multiplicación por escalares
Lo interesante es que V y W pueden tener dimensiones diferentes. Por ejemplo, puedes transformar un vector de ℝ² a ℝ³. La notación T: V → W indica que T toma vectores del dominio V y los envía a un subconjunto de W.
⚡️ Dato clave: Toda transformación lineal preserva el origen. Siempre se cumple que T(0) = 0, lo que puedes demostrar fácilmente usando las propiedades básicas.
Las transformaciones lineales tienen propiedades importantes como el núcleo (Nuc T), que es el conjunto de vectores que T transforma en el vector cero, y la imagen (Im T), que es el conjunto de todos los vectores que pueden obtenerse al aplicar T a algún vector de V. Ambos conjuntos son subespacios vectoriales.
La dimensionalidad de estos subespacios está relacionada por el Teorema de la Dimensión: ρ(T) + ν(T) = dim(V), donde ρ(T) es el rango y ν(T) es la nulidad de T. Esta ecuación es fundamental para entender cuánta información se preserva o se pierde en la transformación.
2
of 13Inscríbete para ver los apuntes. ¡Es gratis!
- Acceso a todos los documentos
- Mejora tus notas
- Únete a millones de estudiantes
Al registrarte aceptas las Condiciones del servicio y la Política de privacidad.
Ejemplos de Transformaciones Lineales
Las transformaciones lineales aparecen constantemente en matemáticas y sus aplicaciones. Vamos a explorar algunos ejemplos claros para entender mejor su funcionamiento:
La reflexión respecto al eje y es una transformación lineal que convierte (x,y) en . Es fácil comprobar que cumple las propiedades: si reflejamos dos vectores y luego los sumamos, obtenemos el mismo resultado que si los sumamos primero y luego reflejamos.
La multiplicación por una matriz es siempre una transformación lineal. Si definimos T = Ax donde A es una matriz m×n, entonces T transforma vectores de ℝⁿ a ℝᵐ. Esta es una de las formas más comunes de representar transformaciones lineales.
💡 Importante: No todas las transformaciones son lineales. Por ejemplo, T = 5x + 2 no es lineal porque tiene un término constante que rompe la regla T(0) = 0.
La rotación en el plano es otra transformación lineal clásica. Cuando rotamos un vector (x,y) un ángulo θ, obtenemos un nuevo vector (x',y') donde:
- x' = x·cos(θ) - y·sen(θ)
- y' = x·sen(θ) + y·cos(θ)
Estas transformaciones se pueden representar mediante la matriz de rotación:
[cos(θ) -sen(θ)]
[sen(θ) cos(θ)]
La rotación preserva la longitud de los vectores, lo que la convierte en un tipo especial de transformación lineal llamada isometría.
3
of 13Inscríbete para ver los apuntes. ¡Es gratis!
- Acceso a todos los documentos
- Mejora tus notas
- Únete a millones de estudiantes
Al registrarte aceptas las Condiciones del servicio y la Política de privacidad.
Propiedades Fundamentales
Las transformaciones lineales tienen características que las hacen extremadamente útiles en álgebra lineal y sus aplicaciones. Aquí veremos algunas de sus propiedades más importantes:
Una transformación lineal queda completamente determinada por lo que hace a los vectores de una base. Esto significa que si conocemos T(v₁), T(v₂), ..., T(vₙ) para una base {v₁, v₂, ..., vₙ}, entonces podemos calcular la transformada de cualquier vector en el espacio.
La proyección ortogonal es un ejemplo importante de transformación lineal. Si H es un subespacio de ℝⁿ con base ortonormal {u₁, u₂, ..., uₖ}, la proyección de un vector w sobre H se define como: P = (w·u₁)u₁ + (w·u₂)u₂ + ... + (w·uₖ)uₖ
🔍 Observación: Las transformaciones lineales preservan las combinaciones lineales. Si T es lineal y v = α₁v₁ + α₂v₂ + ... + αₙvₙ, entonces T = α₁T(v₁) + α₂T(v₂) + ... + αₙT(vₙ).
El operador transposición que convierte una matriz A en su transpuesta A^T es también una transformación lineal. Esto es fácil de comprobar ya que ^T = A^T + B^T y (αA)^T = αA^T.
Estas propiedades nos ayudan a manipular y entender las transformaciones lineales de manera más efectiva, aprovechando la estructura algebraica subyacente de los espacios vectoriales.
4
of 13Inscríbete para ver los apuntes. ¡Es gratis!
- Acceso a todos los documentos
- Mejora tus notas
- Únete a millones de estudiantes
Al registrarte aceptas las Condiciones del servicio y la Política de privacidad.
Transformaciones No Lineales y Rotaciones
No todas las transformaciones entre espacios vectoriales son lineales. Es crucial poder identificar cuándo una transformación no cumple las propiedades requeridas:
Por ejemplo, la transformación T = 5x + 2 de ℝ a ℝ no es lineal. Si verificamos la primera propiedad: T = 5 + 2 = 5x₁ + 5x₂ + 2 Mientras que T(x₁) + T(x₂) = + = 5x₁ + 5x₂ + 4
Como 5x₁ + 5x₂ + 2 ≠ 5x₁ + 5x₂ + 4, esta transformación no es lineal.
⚠️ Atención: Cualquier función con un término constante nunca será una transformación lineal, pues rompe la propiedad T(0) = 0.
La transformación de rotación es un caso especial que merece atención detallada. Cuando rotamos un vector (x,y) un ángulo θ, las nuevas coordenadas (x',y') están dadas por: x' = r·cos = x·cos(θ) - y·sen(θ) y' = r·sen = x·sen(θ) + y·cos(θ)
Estas ecuaciones pueden expresarse en forma matricial como: [x'] [cos(θ) -sen(θ)] [x] [y'] = [sen(θ) cos(θ)] [y]
La rotación preserva la norma del vector , lo que la convierte en una isometría, un tipo especial de transformación lineal que preserva distancias.
5
of 13Inscríbete para ver los apuntes. ¡Es gratis!
- Acceso a todos los documentos
- Mejora tus notas
- Únete a millones de estudiantes
Al registrarte aceptas las Condiciones del servicio y la Política de privacidad.
Teoremas Fundamentales
Los teoremas sobre transformaciones lineales nos permiten entender su comportamiento y propiedades de manera más profunda:
El primer teorema fundamental establece que toda transformación lineal preserva combinaciones lineales. Si T es una transformación lineal, entonces:
- T(0) = 0
- T = T - T
- T = α₁T(v₁) + α₂T(v₂) + ... + αₙT(vₙ)
Estas propiedades se derivan directamente de la definición y pueden demostrarse fácilmente por inducción.
🌟 Concepto clave: Una transformación lineal queda completamente determinada por cómo transforma los vectores de una base. Dos transformaciones que coinciden en los vectores de una base son idénticas.
La demostración de este teorema es directa: si dos transformaciones T₁ y T₂ transforman igual a los vectores de una base {v₁, v₂, ..., vₙ}, entonces para cualquier vector v = α₁v₁ + α₂v₂ + ... + αₙvₙ:
T₁ = α₁T₁(v₁) + α₂T₁(v₂) + ... + αₙT₁(vₙ) = α₁T₂(v₁) + α₂T₂(v₂) + ... + αₙT₂(vₙ) = T₂
Esto simplifica enormemente el trabajo con transformaciones lineales, pues solo necesitamos conocer su efecto en los vectores de una base para determinar completamente su comportamiento.
6
of 13Inscríbete para ver los apuntes. ¡Es gratis!
- Acceso a todos los documentos
- Mejora tus notas
- Únete a millones de estudiantes
Al registrarte aceptas las Condiciones del servicio y la Política de privacidad.
Imagen y Núcleo
Dos conceptos fundamentales para entender transformaciones lineales son la imagen y el núcleo:
El núcleo de una transformación lineal T: V → W (denotado como Nuc T) es el conjunto de todos los vectores en V que T mapea al vector cero de W: Nuc T = {v ∈ V | T = 0}
La imagen de T (denotada como Im T) es el conjunto de todos los vectores en W que son resultado de aplicar T a algún vector de V: Im T = {w ∈ W | w = T para algún v ∈ V}
📌 Importante: El núcleo siempre contiene al menos el vector cero, ya que T(0) = 0 para toda transformación lineal.
Un teorema esencial establece que tanto el núcleo como la imagen de una transformación lineal son subespacios vectoriales. Esto significa que:
- El núcleo es subespacio del dominio V
- La imagen es subespacio del codominio W
La dimensión del núcleo se llama nulidad de T: v(T) = dim(Nuc T) La dimensión de la imagen se llama rango de T: ρ(T) = dim(Im T)
Estas dimensiones están relacionadas por el Teorema de la Dimensión, que establece: ρ(T) + v(T) = dim(V)
Este teorema es fundamental y nos permite calcular una dimensión conociendo las otras, ofreciendo una visión profunda de cuánta información se preserva o se pierde en la transformación.
7
of 13Inscríbete para ver los apuntes. ¡Es gratis!
- Acceso a todos los documentos
- Mejora tus notas
- Únete a millones de estudiantes
Al registrarte aceptas las Condiciones del servicio y la Política de privacidad.
Propiedades de Núcleo e Imagen
El núcleo y la imagen de una transformación lineal tienen propiedades importantes que facilitan el análisis de transformaciones:
Para determinar el núcleo de una transformación, buscamos todos los vectores que se transforman en cero. Por ejemplo, si T: ℝ³ → ℝ² está definida por T(x,y,z) = (x,y,0), el núcleo serían todos los vectores de la forma (0,0,z), que corresponde al eje z.
Para encontrar la imagen, identificamos todos los posibles resultados de la transformación. En el ejemplo anterior, la imagen sería el plano xy en ℝ².
🧮 Cálculo práctico: Para transformaciones en espacios finitos, podemos calcular núcleo e imagen usando la matriz asociada a la transformación y aplicando técnicas de reducción Gaussiana.
El teorema que relaciona núcleo, imagen y dimensiones establece que:
- La nulidad v(T) = dimensión del núcleo
- El rango ρ(T) = dimensión de la imagen
- v(T) + ρ(T) = dim(V)
Este resultado es poderoso porque nos permite determinar, por ejemplo, cuánta información se pierde en una transformación. Si el núcleo solo contiene al vector cero, la transformación es inyectiva (no hay pérdida de información). Si la imagen coincide con todo W, la transformación es sobreyectiva (alcanza todos los posibles resultados).
Una transformación que es tanto inyectiva como sobreyectiva se denomina isomorfismo, y establece que los espacios V y W son esencialmente "el mismo" desde un punto de vista algebraico.
8
of 13Inscríbete para ver los apuntes. ¡Es gratis!
- Acceso a todos los documentos
- Mejora tus notas
- Únete a millones de estudiantes
Al registrarte aceptas las Condiciones del servicio y la Política de privacidad.
Representación Matricial
Una de las ventajas de las transformaciones lineales es que pueden representarse mediante matrices, lo que facilita su estudio y aplicación:
Para una transformación lineal T: ℝⁿ → ℝᵐ, existe una única matriz A_T de dimensión m×n tal que: T = A_T·x
Esta matriz se construye colocando como columnas las transformaciones de los vectores de la base canónica: A_T = [T(e₁) T(e₂) ... T(eₙ)]
🔄 Proceso práctico: Para encontrar la matriz de una transformación, solo necesitas calcular cómo transforma cada vector de la base canónica y colocar estos resultados como columnas de la matriz.
El razonamiento detrás de esta representación es sencillo. Si x = x₁e₁ + x₂e₂ + ... + xₙeₙ, entonces: T = T = x₁T(e₁) + x₂T(e₂) + ... + xₙT(eₙ)
Esta última expresión corresponde exactamente al producto matricial A_T·x.
La representación matricial nos permite usar todas las herramientas del álgebra matricial para estudiar transformaciones lineales. Por ejemplo, podemos afirmar que:
- La imagen de T coincide con el espacio columna de A_T
- El núcleo de T coincide con el espacio nulo de A_T
- El rango de T es igual al rango de A_T
- La nulidad de T es igual a la nulidad de A_T
Estos resultados confirman la poderosa relación entre transformaciones lineales y matrices.
9
of 13Inscríbete para ver los apuntes. ¡Es gratis!
- Acceso a todos los documentos
- Mejora tus notas
- Únete a millones de estudiantes
Al registrarte aceptas las Condiciones del servicio y la Política de privacidad.
Ejemplos Prácticos
Veamos cómo aplicar los conceptos teóricos a ejemplos concretos de transformaciones lineales:
Ejemplo 1: Sea T: ℝ³ → ℝ⁴ definida por: T(x,y,z) =
Para encontrar la matriz A_T, calculamos la transformación de cada vector de la base canónica: T(1,0,0) = T(0,1,0) = T(0,0,1) = (0, 2, 0, 1)
Por lo tanto: A_T = [ 1 -1 0 -1 1 2 1 0 0 0 0 1 ]
🔍 Verificación: Podemos comprobar que T = A_T · ᵀ
Para encontrar núcleo e imagen, reducimos la matriz a forma escalonada: [ 1 -1 0 0 0 1 0 0 0 0 0 0 ]
De aquí deducimos que:
- El rango es 2 (hay 2 filas no nulas)
- La imagen de T es un subespacio bidimensional de ℝ⁴
- La nulidad es 1 (3 variables - 2 pivotes)
- El núcleo está generado por el vector (1,1,0)
Esto confirma el Teorema de la Dimensión: ρ(T) + v(T) = 2 + 1 = 3 = dim(ℝ³)
10
of 13Inscríbete para ver los apuntes. ¡Es gratis!
- Acceso a todos los documentos
- Mejora tus notas
- Únete a millones de estudiantes
Al registrarte aceptas las Condiciones del servicio y la Política de privacidad.
Cambios de Base e Isomorfismos
Las transformaciones lineales pueden representarse con matrices diferentes según las bases elegidas para los espacios vectoriales:
Si T: V → W es una transformación lineal, y escogemos bases B₁ para V y B₂ para W, existe una única matriz A_T que representa T respecto a estas bases. Si cambiamos a otras bases, la matriz de representación también cambia.
Si P es la matriz de transición de la base B₁ a la base estándar y Q es la matriz de transición de B₂ a la base estándar, entonces: A'_T = Q⁻¹·A_T·P
🌐 Conceptos avanzados: Aunque la matriz que representa una transformación depende de las bases elegidas, propiedades como el rango y la nulidad son invariantes.
Un isomorfismo es una transformación lineal que es tanto inyectiva como sobreyectiva (es decir, su núcleo solo contiene al vector cero y su imagen es todo el espacio de llegada). Dos espacios vectoriales son isomorfos si existe un isomorfismo entre ellos.
Un teorema fundamental establece que dos espacios vectoriales reales son isomorfos si y solo si tienen la misma dimensión. Esto significa que, desde un punto de vista algebraico, todos los espacios vectoriales reales de la misma dimensión son "el mismo espacio".
Las isometrías son transformaciones lineales que preservan la norma (distancia). En ℝⁿ, una transformación es una isometría si y solo si su matriz representativa es ortogonal. Ejemplos típicos incluyen rotaciones y reflexiones.
Estos conceptos avanzados son fundamentales para entender la estructura profunda de las transformaciones lineales y sus aplicaciones.
11
of 13Inscríbete para ver los apuntes. ¡Es gratis!
- Acceso a todos los documentos
- Mejora tus notas
- Únete a millones de estudiantes
Al registrarte aceptas las Condiciones del servicio y la Política de privacidad.
12
of 13Inscríbete para ver los apuntes. ¡Es gratis!
- Acceso a todos los documentos
- Mejora tus notas
- Únete a millones de estudiantes
Al registrarte aceptas las Condiciones del servicio y la Política de privacidad.
13
of 13Inscríbete para ver los apuntes. ¡Es gratis!
- Acceso a todos los documentos
- Mejora tus notas
- Únete a millones de estudiantes
Al registrarte aceptas las Condiciones del servicio y la Política de privacidad.
Pensamos que nunca lo preguntarías...
Nuestro compañero de IA está específicamente adaptado a las necesidades de los estudiantes. Basándonos en los millones de contenidos que tenemos en la plataforma, podemos dar a los estudiantes respuestas realmente significativas y relevantes. Pero no se trata solo de respuestas, el compañero también guía a los estudiantes a través de sus retos de aprendizaje diarios, con planes de aprendizaje personalizados, cuestionarios o contenidos en el chat y una personalización del 100% basada en las habilidades y el desarrollo de los estudiantes.
Puedes descargar la app en Google Play Store y Apple App Store.
¡Sí lo es! Tienes acceso totalmente gratuito a todo el contenido de la app, puedes chatear con otros alumnos y recibir ayuda inmeditamente. Puedes ganar dinero utilizando la aplicación, que te permitirá acceder a determinadas funciones.
Contenido similar
Contenidos más populares: Linear Independence
1Contenidos más populares de Matemáticas
9Función cuadrática: Fórmulas y Análisis de la parábola.
Resumen teórico-práctico sobre la función cuadrática, sus fórmulas principales y el estudio de la parábola como representación gráfica.Incluye desarrollo de la forma general, cálculo de raíces, vértice y elementos fundamentales para su interpretación
4°2693
M
matematicas
ecuaciones
2°3220
resumen de análisis gráficos y ejes
resumen de ejes y análisis de gráfico
3°2743
ecuación
nosenada
2°2201
Ecuaciones Lineales: Resolución Paso a Paso
Una guía detallada para resolver ecuaciones lineales de una variable, con ejemplos y pasos claros.
2°3,24327
Matemáticas
Como pasar de numero mixto y fracción y viceversa. Fracciones equivalentes.
1°49311
Lenguaje coloquial y simbólico
Primer trabajo 1
1°1731
Matemáticas.
Tema de geometria 4 año.
4°1111
REGLA DE SIGNOS
Matematicas, multiplicación y división, suma y resta.
2°2743
Contenidos más populares
9C
celula eucriota, membrana plasmática, núcleo, pared celular, citoplasma y citoesqueletos. nombre se las partes de la celula eucariota
Este quiz evalúa tu conocimiento sobre la célula eucariota, incluyendo la membrana plasmática, núcleo, pared celular, citoplasma y citoesqueleto.
2°4850
Simple present
Estructura del present simple/simple present
1°4817
Resumen gramática inglesa B2
Contiene los temas básicos necesarios para el FCE
6°4555
Geografía 1er año
definición geografía-coordenadas geográficas-meridianos-paralelos-definición latitud y longitud-elementos del mapa-definición mapa-localización relativa y absoluta
1°2843
Contines y océanos
Geografía
1°4302
Análisis sintáctico de oraciones
explicación de el análisis de oraciones
2°51010
🪻✨️verbo to be✨️🪻
Verbo tobe para estudiar simple y facil
1°2692
Biologia
Fases
Universidad96314
Función cuadrática: Fórmulas y Análisis de la parábola.
Resumen teórico-práctico sobre la función cuadrática, sus fórmulas principales y el estudio de la parábola como representación gráfica.Incluye desarrollo de la forma general, cálculo de raíces, vértice y elementos fundamentales para su interpretación
4°2693
Mira lo que dicen nuestros usuarios. Les encantó — y a ti también te encantará.
4.6/5App Store
4.7/5Google Play
La app es muy fácil de usar y está muy bien diseñada. Hasta ahora he encontrado todo lo que estaba buscando y he podido aprender mucho de las presentaciones. Definitivamente utilizaré la aplicación para un examen de clase. Y, por supuesto, también me sirve mucho de inspiración.
Pablousuario de iOS
Esta app es realmente genial. Hay tantos apuntes de clase y ayuda [...]. Tengo problemas con matemáticas, por ejemplo, y la aplicación tiene muchas opciones de ayuda. Gracias a Knowunity, he mejorado en mates. Se la recomiendo a todo el mundo.
Elenausuaria de Android
Vaya, estoy realmente sorprendida. Acabo de probar la app porque la he visto anunciada muchas veces y me he quedado absolutamente alucinada. Esta app es LA AYUDA que quieres para el insti y, sobre todo, ofrece muchísimas cosas, como ejercicios y hojas informativas, que a mí personalmente me han sido MUY útiles.
Anausuaria de iOS